
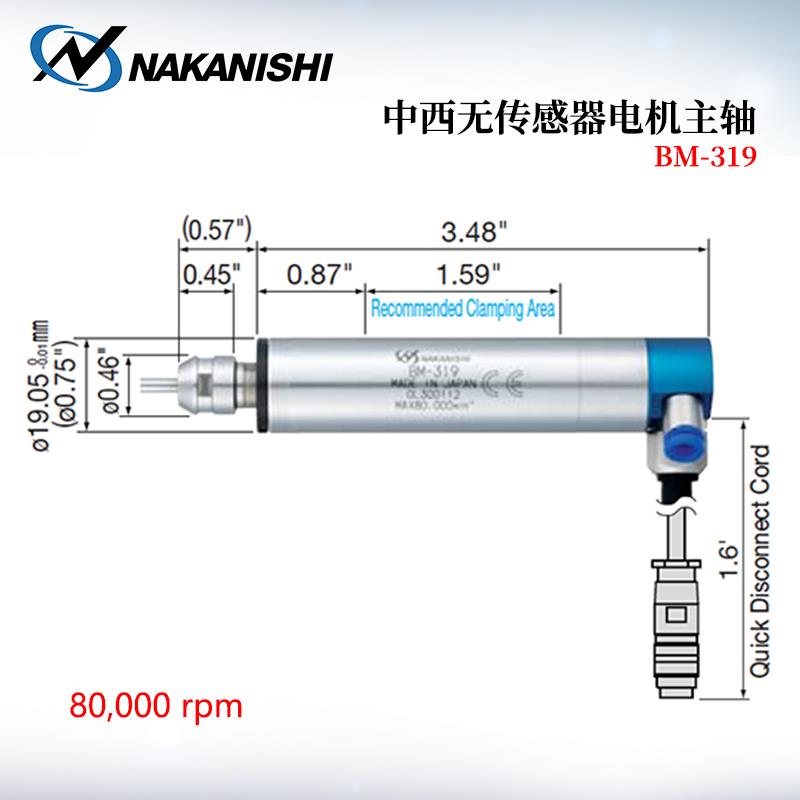
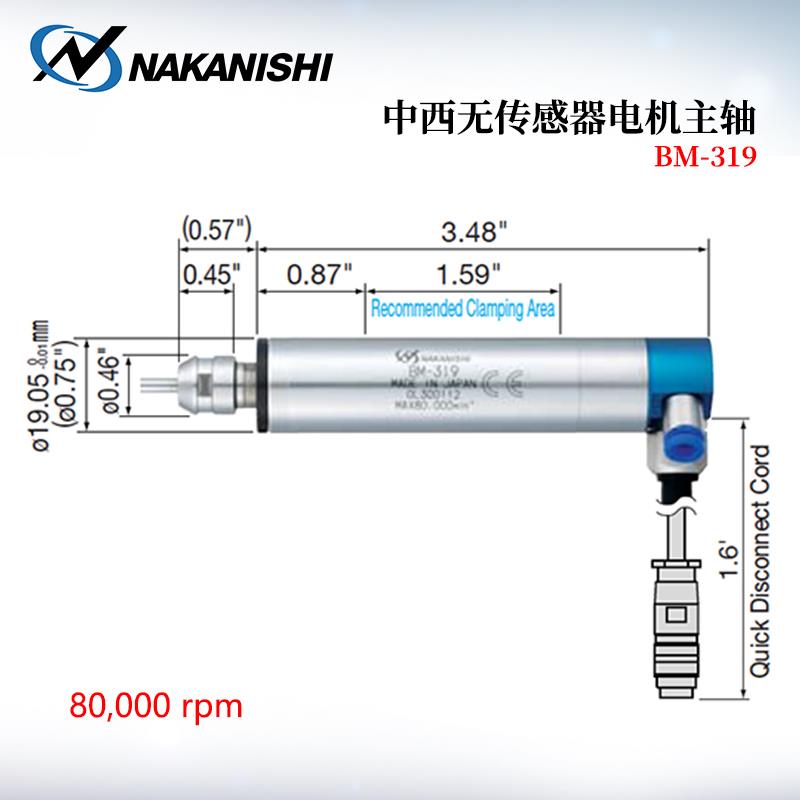
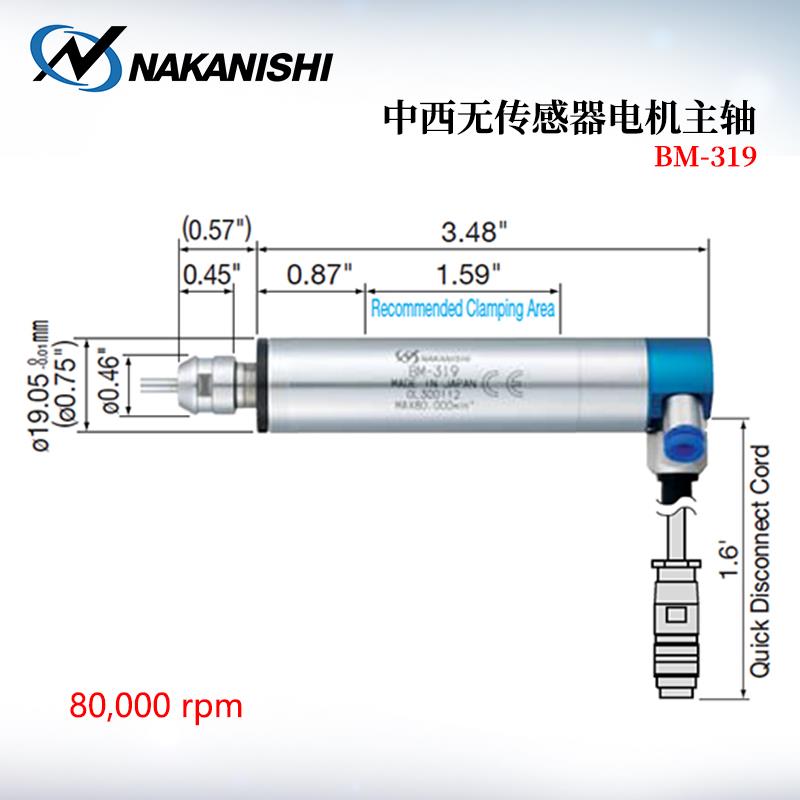
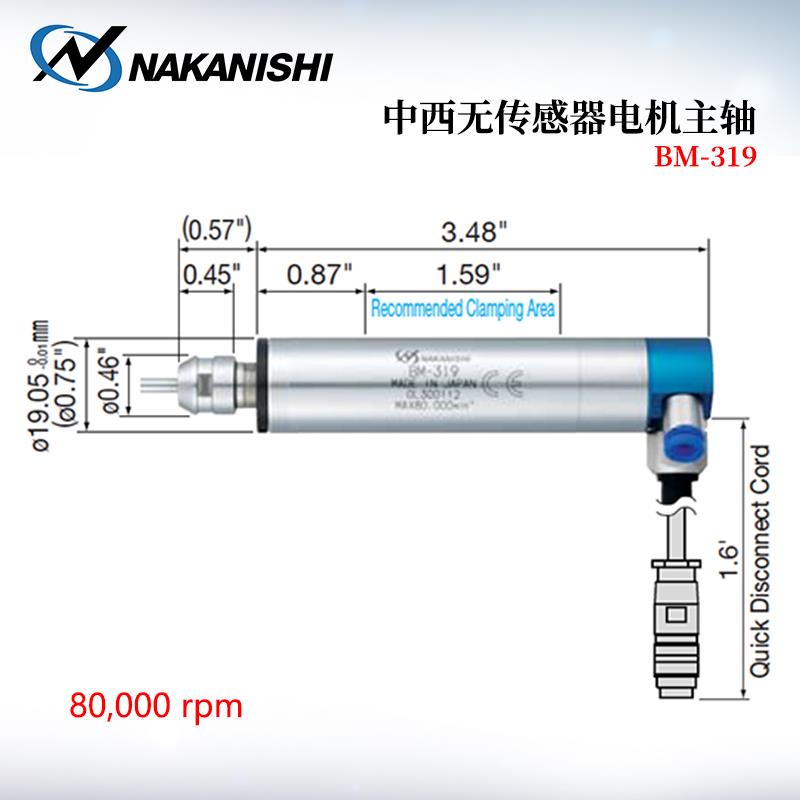
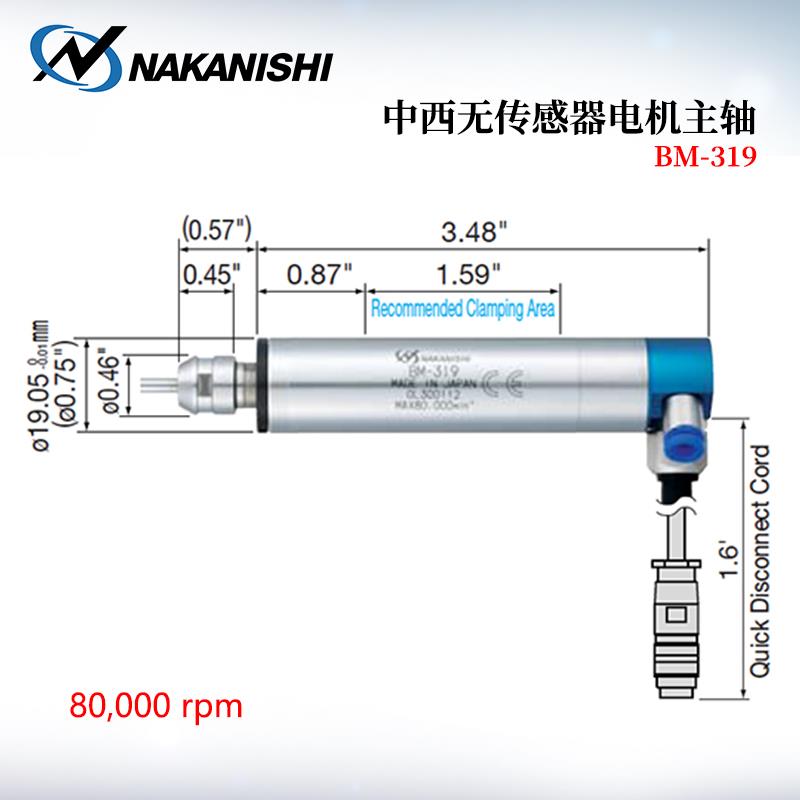
NAKANISHI NSK中西无传感器电机主轴BM-319
价格:电议
地区:广东省 深圳市
手 机:13725586407
图文详情
产品属性
相关推荐
无传感器电机主轴是一种将电机与机床主轴融为一体,且不依赖外部位置或速度传感器来实现控制的技术。以下是关于它的介绍:
反电动势法:在无刷直流电机中,当转子旋转时,定子绕组会产生反电动势。通过检测反电动势的过零点等特征,可以估算出转子的位置和转速,从而实现换相控制。例如,在光伏水泵系统中应用的直流无刷电机,就常采用反电势法来实现电子换相,不过在静止或低速状态下反电势值为 0 或很小,通常采用三段式起动方式来解决这个问题。
模型参考自适应法(MRAS):以电机本身的数学模型为参考模型,建立一个可调模型。通过比较两个模型的输出,利用自适应算法调整可调模型的参数,使可调模型的输出尽可能接近参考模型的输出,最终得到转子的转速与位置观测值。
滑模观测器法(SMO):利用滑模变结构控制理论,设计一个滑模观测器来观测电机的状态变量,如转子位置和速度。即使系统存在不确定性和干扰,滑模观测器也能保证观测误差在有限时间内收敛到零。但这种方法存在高频抖震问题。
优点:无传感器电机主轴省掉了传感器及相关的安装结构,使电机主轴的结构更加紧凑、简单,降低了成本和安装复杂度;没有传感器,也就不存在传感器故障的问题,提高了系统的可靠性和稳定性,尤其适用于高温、潮湿、多尘等恶劣环境;由于减少了传感器带来的信号传输延迟和干扰,系统的动态响应速度可能会有所提高。
缺点:在低速运行时,反电动势较小,检测精度会受到影响,导致控制性能下降;需要较为复杂的算法来估算转子位置和速度,对控制器的运算能力要求较高;受电机参数变化和外界干扰的影响较大,例如电机绕组电阻、电感等参数会随温度变化,从而影响估算精度。


数控机床:可实现高精度加工,减少了因传感器故障导致的加工误差,提高了加工效率和产品质量。
机器人:有助于降低机器人关节的体积和重量,提高机器人的运动灵活性和精度,同时增强了系统在复杂工况下的可靠性。
电动车辆:使驱动系统更加紧凑和可靠,提升了车辆的空间利用率和续航能力,在一些对可靠性要求较高的特种车辆中应用前景广阔。
航空航天:减轻了飞行器的重量,提高了系统的可靠性,满足了航空航天领域对设备轻量化和高可靠性的严格要求。
一年
测量精准
