
西门子300链接G120变频驱动和二台V90伺服控制器
发布时间:2018/6/28 13:47:00西门子300通过G120变频驱动和二台V90伺服控制器
希殿电气技术(上海)有限公司(西门子经销商)
联系人 :康经理(销售工程师)发布
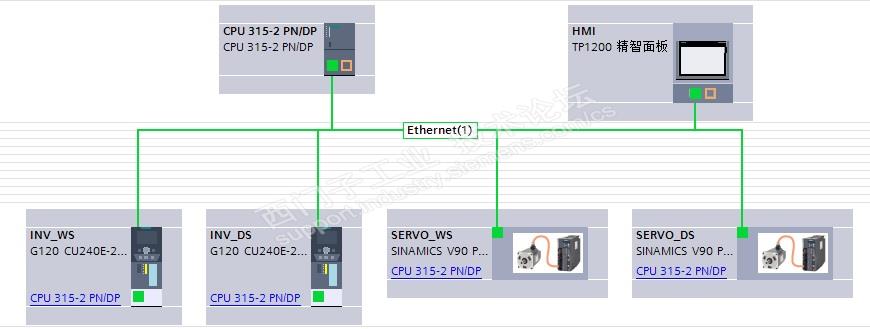
系统描述:PLC S7-300通过PN网络控制二台G120变频驱动和二台V90伺服控制器,为组态V90伺服驱动,编程环境从STEP7切换到TIA博途V14。
1、硬件:PLC:CPU315-2PN/DP、变频:G120 CU240E-2 PN控制单元+PM240-2功率单元、伺服:V90伺服驱动+SIMOTICS伺服电机(编码器20位*20圈)、HMI:TP1200,利用西门子交换机XB008实现数据通讯;
硬件配置Weidmuller安全继电器控制急停功能、延时继电器达到断电延时断开变频和伺服的驱动使能电源(G120_DI0::配置849[0]、V90:STO +/STO 1/STO 2);控制单元接入DC_24V,保证主回路电源断开时网络通讯正常。
2、博途V14软件安装:
1)STEP 7 Professional V14
2)WinCC Professional V14
3)SINAMICS Startdrive V14
4)SIMATIC STEP 7 PLCSIM V14
5)SINAMICS-V-ASSISTANT和V90 usb driver。
3、变频G120:系统安装Startdrive完成,可离线配置G120的PROFINET设备名称、IP地址和通讯报文999(系统自动定义PLC端IO地址,可手动修改),从在线并诊断菜单将对应的G120变频配置好Profinet设备名和IP地址,可在线变频,通过调试向导逐步配置对应电机铭牌参数和静态、动态优化。编写程序将对应的PIW/PQW赋值到具体的MW或DB地址,方可实现监控。
4、伺服V90:按照上述在线并诊断菜单配置好Profinet设备名称和IP地址和通讯报文111,此处配置是在“Other field devices”下“Profinet IO”中找出V90的GSD文件,而不是“驱动和启动器目录”,配置好分别到PLC和V90驱动器内,PLC在线可看到对应设备;
打开V-ASSITANT软件,Mini_USB线连接到对应伺服驱动器完好、在线会显示连接驱动器,逐步配置:
1)控制模式:基本定位器控制(EPOS);
2)Jog:确认方向,可通过29000反转;
3)选择报文111,确认站名和IP地址;
4)机械机构、数据可默认,PLC程序内处理换算;
5)设置参数设定值:EPOS Jog设置点动时速度基准值;
6)配置斜坡功能:扩展斜坡发生器和圆弧段时间;
7)设置极限值:扭矩和速度作相应限幅;
8)配置回零参数:设置回零参考点,此处设置时结合机械实际位置推算对应的LU值,当然也可通过FB284(SINA_POS)设置回零位置功能软件实现,但操作之后需保存到ROM,否则断电后回到上次系统保存值。
9)P29150和P29151根据实际需求配置自定义通讯字;
10)一键自动优化,使能伺服后系统自动会作电机优化,配置完成,保存到ROM。
5、PLC程序:程序添加OB86(RACK_FLT)、OB87(COMM_FLT),避免网络通讯中断时PLC发生DOWN机;
FB284(SINA_POS):
1)ModePos 1_相对定位、2_定位、3_连续位置运行,在任意时刻可以在MDI运行模式内进行切换;而Execute在信号上升沿生效,读取ModePOS、Velocity和Position设置值;
2)Velocity(量纲1000UL/min,因伺服配置齿轮闭:1/1、机械行程:10000/圈),所以速度设定为60时,变频面板显示r=6;同时位置给定要结合执行机械给进量和齿轮比推算;
3)速度反馈对应量纲(ox4000,0000=P2000参考转速),可右移16位通过16384换算实际转速、进而推算机械给进速度;
4)RejTrvTsk:终止当前任务,对Jog无效;IntMStop:暂停。