
西门子S120驱动模块
发布时间:2018/5/31 9:25:00西门子S120驱动模块
6SL3120-1TE32-0AA4SINAMICS S120 单电机模块 输入:600V DC 输出:3AC 400V,200A 输出:8 kHz/140A 时 结构形式:书本尺寸 内部风冷 优化的脉冲图形和 支持扩展 安全集成功能 包含 DRIVE-CLiQ 电缆
1 问题
S120 书本型模块有哪些冷却方式?
2 回答
SINAMICS S120 书本型模块提供了以下几种不同冷却方式的订货形式:
(1) 内部风冷
(2) 外部风冷
(3) 冷却板式冷却
(4) 液体冷却
各种冷却方式的详细说明如表1所示。
Normal 0 false false false false EN-US ZH-CN X-NONE
序号 | 说明与图示 |
1. | 内部风冷 驱动组件中电子单元和功率单元产生的功率损耗通过自然冷却或强制通风系统排散到控制柜内部 
|
2. | 外部风冷 采用“穿孔”技术,系统组件中功率单元的散热器穿过控制柜内的安装面。因此可以将电力电路的热损耗释放到一个单独的外部冷却回路上,柜内残留的热损耗由电子元件产生。这种外部散热器可以达到IP54防护等级。散热器配有散热片和风扇(属于供货范围),向后伸出一个单独的通风管道,该管道也可以向外打开。 
|
3. | 冷却板式冷却 采用冷却板式冷却的单元可以将功率单元的热损耗通过单元后面板上的导热介质传导到一个外部散热器上。例如,外部散热器可采用水冷。 
|
4. | 液体冷却 在液冷单元,功率半导体安装在冷却介质流经的散热器上,该单元产生的大部分热量会被冷却介质吸收并可在控制柜外耗散。 
|
表1各种冷却方式的详细说明
1 概述
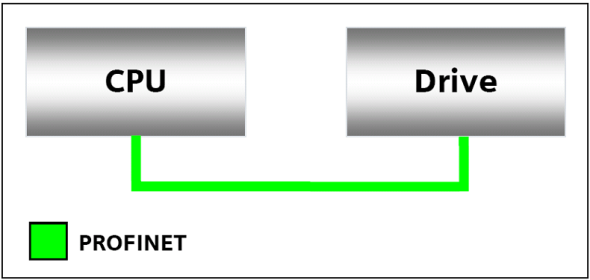
图1.
如图1 所示:可以在 SIMATIC CPU 和 SINAMICS S120 驱动之间实现 PROFINET IRT 等时同步通讯。通过这种通讯方式可以实现多个 SINAMICS S120 驱动同时发送和接收数据,也可以实现多个 SINAMICS S120 驱动轴的同步运行。
SIMATIC CPU 做为PROFINET IRT IO controller, SINAMICS S120 做为 PROFINET IRT IO device。
SIMATIC CPU 按照报文的定义发送控制字或给定值;SINAMICS S120 则发送状态字或实际速度、位置等状态信号。
2 硬件配置以及软硬件的要求
2.1 硬件配置
硬件配置如图2所示:
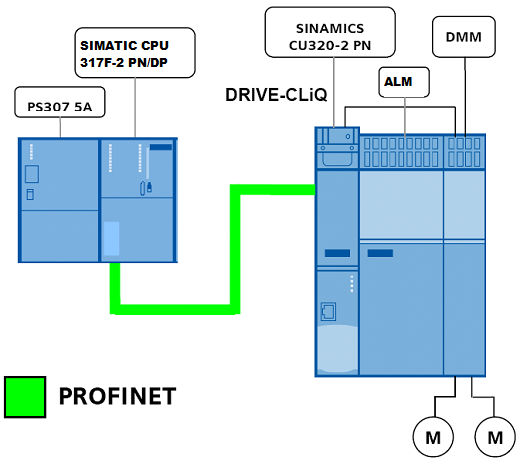
图2.
2.2 软硬件的要求
示例程序所采用的硬件如表1所示:
| 组件 | 数量 | 订货号 | 注意事项 |
| SIMATIC CPU 317F-2 PN/DP | 1 | 6ES7317-2EK14-0AB0 | V3.2.6 |
| SINAMICS S120 CU320-2 PN | 1 | 6SL3040-1MA01-0AA0 | V4.4.2 |
| SINAMICS Motor Module | 1 | 6SL3120-2TE13-0AA3 | |
| SINAMICS ALM | 1 | 6SL3130-7TE21-6AA3 | |
| Motor | 2 | 1FK7022-5AK71-1DG0 |
表1.
要实现SIMATIC CPU 和 SINAMICS S120 的 PROFINET IRT 等时同步通讯,对软硬件版本要求如表2所示:
| 组件 | 版本 | 注意事项 |
| STEP7 | V5.5 HF4 | - |
| STARTER | V4.2 | - |
| Drive ES Basic | V5.4+SP5 | - |
| SIMOTION SCOUT | V4.2.1.0 | - |
| S7-300 CPU Firmware | V3.2 | - |
| S7-400 CPU Firmware | V6.0 | - |
| SINAMICS S120 Firmware | V4.4 | - |
表2.
3 项目的配置
3.1 SIMATIC CPU 硬件配置西门子S120驱动模块打开 STEP7 SIMATIC Manager,创建一个新的项目并插入一个新的 SIMATIC 300站。如图3所示:
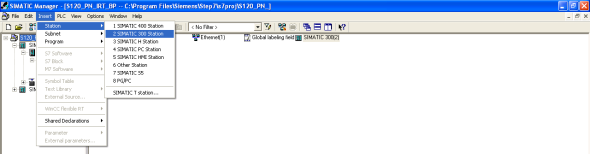
图3.
选择 SIMATIC CPU 317F-2 PN/DP V3.2,如图4所示:
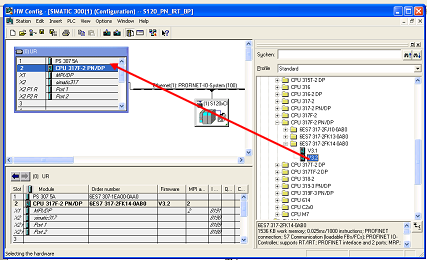
图4.
创建一个新的 Ethernet 网络并分配 IP 地址,如图5所示:

图5.
双击 PROFINET 接口来打来属性窗口,定义 device name,如图6所示:
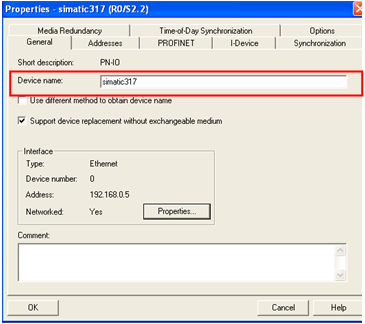
图6.
3.2 SINAMICS S120 硬件配置
将 SINAMICS CU320-2 PN V4.4 拖拽到 PROFINET 网络,如图7如示:

图7.
给 SINAMICS CU320-2 PN V4.4 分配 IP 地址,如图8如示:
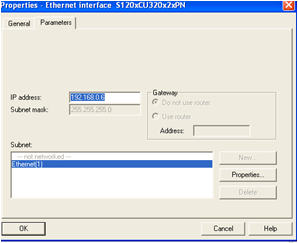
图8.
双击 SINAMICS S120 打开属性窗口,定义 device name,如图9如示:

图9.
Device name 必须被分配到 SINAMICS S120,如图10所示:
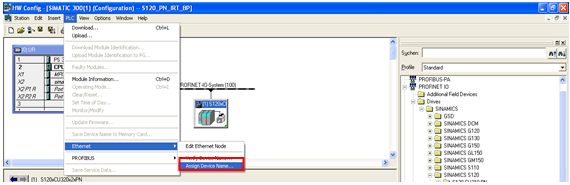
图10.
3.3 等时同步通讯配置
打开PROFINET IO Domain Management,如图11所示:
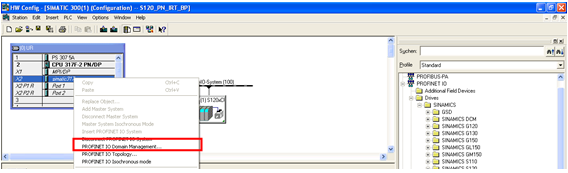
图11.
选择 SIMATIC CPU 和 SINAMICS S120,并打开其属性,如图12所示:

图12.
将 SIMATIC CPU 设置为 Sync master,将 SINAMICS S120 设置为 Sync slave,如图13所示:
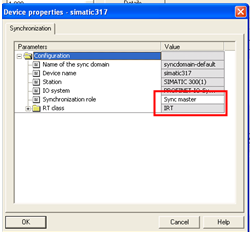
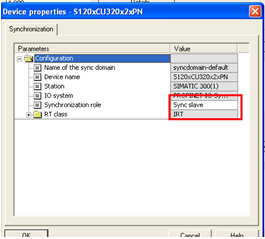
图13.
设置 PROFINET IRT 网络的拓扑,如图14所示:
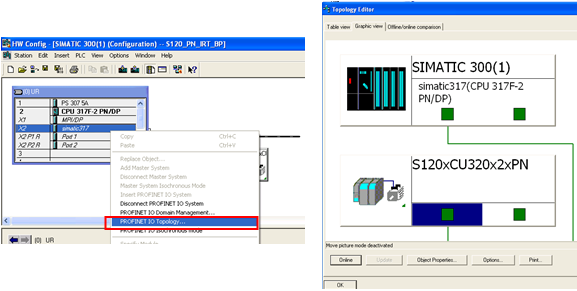
图14.
为了实现 PROFINET IRT 等时同步通讯,必须调用 OB61,并对其进行相关的设置,如图15所示,打开SIMATIC CPU 的属性:
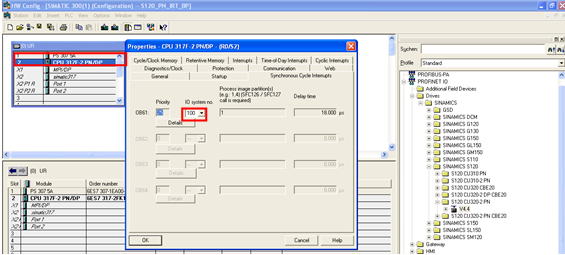
图15.
选择详细的属性设置,设置 Process image partition =1,这样被分配到过程映像区的输入输出数据在每一个总线周期中就被同步更新。在 OB61 中可以访问这些输入输出数据。如图16所示:
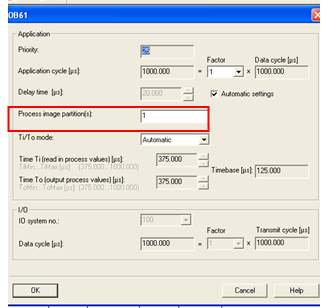
图16.
为了实现 SINAMICS S120 的等时同步通讯,需要打开 PROFINET 接口(PN IO)属性窗口,如图17所示:
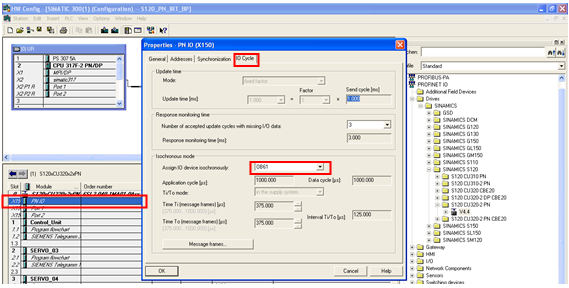
图17.
选择标准111报文,并将报文的输入输出地址分配到过程映像区 PtP1。如图18所示:
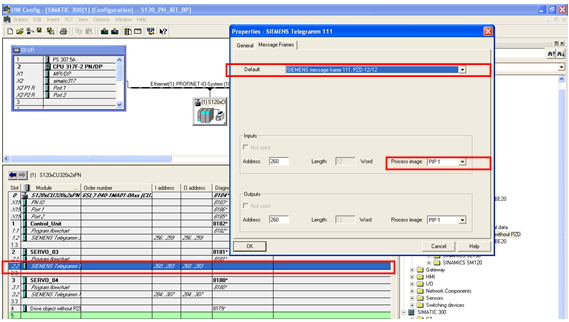
图18.
3.4 SINAMICS S120 的配置
用 STARTER 或 SIMOTION SCOUT 完成 SINAMICS S120 的配置和组态,SINAMICS S120 配置和组态的详细过程请参见中心的文档 A0439 (SINAMICS S120 调试手册) 。
为了通过 PROFINET IRT 通讯实现两个驱动轴的同步运行,示例程序中两个驱动轴均
选择标准111报文,并激活了基本定位功能。通过 MDI 的速度模式来实现对两个驱动轴的控制。驱动轴报文的配置如图19所示:
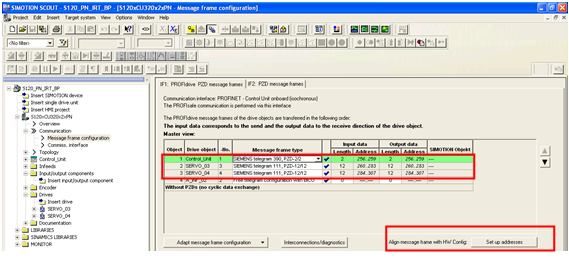
图19.
4 编写程序
在完成 SIMATIC CPU 和 SINAMICS S120 的配置以后,就需要在OB61 中编写程序,整个程序分为四个部分:1. 调用 SFC126 刷新输入过程映像区;2. 按照 111 报文的时序要求,实现对两个驱动轴的MDI 速度控制;3. 产生两个驱动轴控制字2(STW2)第12~15位的生命标志;4. 调用 SFC127 刷新输出过程映像区。
如何通过s120的参数清零增量编码器计数值1 概述 在工业现场中,有些应用上位机需要实时读取S120驱动的编码器增量计数值用于监视电机的位置,本文介绍了S120中的相关参数。2 参数介绍2.1 编码器增量计数值r482驱动参数 r482显示编码器的增量脉冲数计数值,该数值的构成见图2-1,由两部分组成,低位部分表示编码器的细分值P418,高位部分表示编码器的脉冲数。 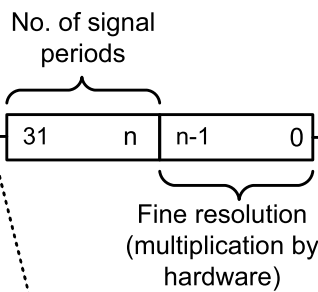
图2-1 参数r482如果需要对r482的编码器计数值进行清零,则需要让此驱动处于非运行状态,之后设置P480.14=1或者P897=1(Park encoder)。2.2 编码器增量计数值r4653驱动参数r4653只有S120的固件版本v4.5以上才有,该参数也可以对编码器的增量进行计数,其构成与r482相似,其功能图见图2-2。 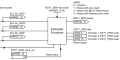
图2-1 参数r4653功能图r4653与r482的不同之处在于,r4653可以在S120运行状态时清零。可以通过参数p4652设置清零方式:? p4652=0,不激活r4653,r4653不对编码器脉冲计数;? p4652=1,激活r4653对编码器脉冲的计数,同时当有编码器零脉冲时对r4653清零;? p4652=2,激活r4653对编码器脉冲的计数,在p4655中设置BICO连接(数字量输入),当p4655有上跳沿产生时,r4653清零;? p4652=3,激活r4653对编码器脉冲的计数,在p4655中设置BICO连接(数字量输入),当p4655有上跳沿产生后的个编码器零脉冲时,r4653清零。
西门子S120驱动模块