
西门子IM153-1接口模块
发布时间:2018/5/31 11:02:00西门子IM153-1接口模块
 | 6ES7153-1AA03-0XB0SIMATIC DP,接口连接 IM 153-1,针对 ET 200M, 用于最多 8 个 S7-300 组件 |
1 简单抱闸控制特点
S120抱闸控制主要分为简单抱闸控制和扩展抱闸控制,可根据应用场合不同而灵活选用。本文主要介绍简单抱闸控制。
S120 简单抱闸控制的特点主要有:
? 通过顺序控制自动激活
? 静态P1227(零速P1228)检测监控
? 强制释放抱闸(p0855,p1215),包括有条件或无条件释放抱闸
? 无条件关闭抱闸(p0858 = 1)
? 取消“使能速度控制器”信号后的抱闸应用(p0856 = 0)
2抱闸功能描述
“简单抱闸控制”专门用于电机抱闸的控制。当驱动不激活时,保持抱闸用于保护驱动装置,以免出现不希望的运动,如位能性的负载或垂直运行的负载出现的危险。
释放和保持抱闸的触发命令通过控制单元(CU)的DRIVE-CLiQ 传送至电机模块,直接把信号互连到电机模块上并进行监控。然后电机模块执行动作并激活保持抱闸的输出。可在
SINAMICS S120/S150 参数手册(功能图2701,2704)中看到详细的顺序控制框图。通过
参数p1215可配置抱闸控制的运行规则,图1所示为简单抱闸控制的顺序图。
打开抱闸的过程:
(1) 当符合启动条件后,控制单元发出ON命令,接触器开始闭合,设备开始预充电。完
成后,开始建立励磁;
(2) 励磁完成后,打开抱闸的输出信号为1;
(3) 此处还可以通过p0855=1强迫释放抱闸命令;
(4) 打开抱闸的输出信号为1,r0899.12=1, 可以控制抱闸装置。此时电机并不会立即加
速,否则会出现溜钩的现象;
(5) 延迟时间p1216到达之后,电机立即加速,直到稳定状态。 p1216的时间需根据现
场情况调节。
关闭抱闸的过程:
(1) 当控制单元发出OFF命令后,电机速度开始下降;
(2) 电机实际速度或设定速度小于p1226所设定的值;
(3) 延迟p1227或p1228时间后,关闭抱闸的输出信号为1;
(4) 此处还可以通过p0858 = 1强迫输出关闭抱闸命令;
(5) 关闭抱闸的输出信号为1,r0899.13=1, 可以控制抱闸装置。此时变频器输出电流仍
存在,否则会出现溜钩的现象;
(6) 延迟时间p1217到达之后,变频器脉冲封锁,输出电流立即降到0。 p1217的时间
需根据现场情况调节。

图1 简单抱闸控制的顺序图
3 抱闸调试过程
如果电机模块具有内部集成的抱闸控制并连接有抱闸装置时,可通过设置参数p1215 = 1激活简单抱闸控制。
如果电机模块没有内部集成的抱闸控制,可通过设置参数p1215 = 3激活抱闸控制,此时需要将“开闸”或/和“关闸”信号互联到CU的输出点上,由此输出点来控制开抱闸。
注意:
? 简单抱闸控制不能应用于维护性的抱闸控制,当应用抱闸控制时一定要考虑特殊
的工艺要求和机械条件以保证人员的安全。
? 当电机有抱闸装置时,设置P1215=0,在启动设备时将导致抱闸装置的损坏。
? 只有书本型功率单元和模块型功率单元有安全抱闸继电器时,才能激活抱闸控制
监测(p1278 = 0)。
抱闸配置:
在STARTER或SCOUT调试软件中,添加一个驱动,然后配置驱动参数。在图2所示抱闸配置界面中,根据实际情况选择1或者3。

图2 选择基本抱闸
在驱动的目录树下选择“Functions”?“Brake control”,打开抱闸设置界面,如图3所示。
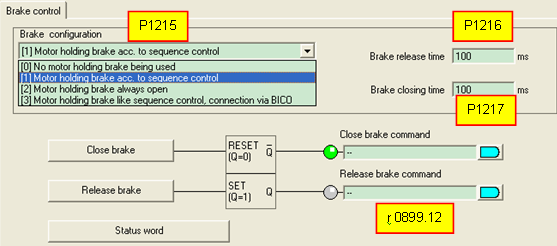
图3 基本抱闸配置
参数设置:
对于参数p1215,可以有以下几种设置方式:
? p1215=0,不使用报闸功能
? p1215=1,基本报闸控制模块集成的抱闸
? p1215=2,电机报闸一直打开
? p1215=3,外部报闸控制装置
p1216为释放抱闸时间,p1217为关闭抱闸时间。一般地,关闭抱闸命令和释放抱闸命令连接一个BICO参数即可,通常连接r0899.12。
关闭抱闸配置:
如图4所示,点击“Close brake”按钮,进入关闭抱闸设置界面。可以设置零速检测阈值(p1266),零速检测监控时间(p1227)和脉冲抑制延迟时间(p1228)。
通过参数p0858设置强制关闭抱闸,可连接至一个开关量,如果此信号为1,则强制关闭抱闸。

图4 关闭抱闸设置
释放抱闸配置:
如图5所示,点击“Release brake”按钮,进入释放抱闸设置界面。通过参数p0855设置强制释放抱闸,可连接至一个开关量,如果此信号为1,则强制释放抱闸。

图5 释放抱闸设置
4 重要参数
列出关于抱闸控制的一些重要参数,可以根据不同应用场合进行灵活设置:
? r0056.4 励磁完成
? r0060 CO 设定值滤波器前的速度设定值
? r0063 CO 实际值滤波后的实际速度值(伺服)
? r0063[0…2] CO 速度实际值
? r0108.14 CO 扩展抱闸控制
? p0855[C] BI 无条件释放抱闸
? p0856 BI 速度控制器使能
? p0858 BI 无条件关闭抱闸
? r0899.12 BO 开抱闸指令
? r0899.13 BO 关抱闸指令
? p1215 电机抱闸配置
? p1216 释放抱闸时间
? p1217 关闭抱闸时间
? p1226 零速检测阈值
? p1227 零速检测监视时间
? p1228 脉冲抑制延迟时间
? p1278 抱闸控制诊断评估
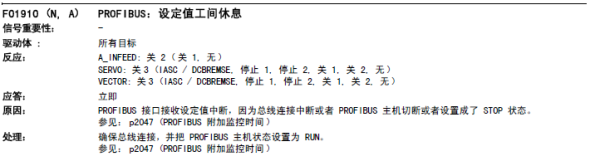
问题:
如何通过一个起动按钮(非自锁)及一个停止按钮(非自锁)控制S120 驱动装置的起动及停止?
回答:
S120的起动/停止控制是通过一个开关量来实现的,即当P0840由0跳变为1,并保持1的状态时装置起动,P0840=0时装置停止。可通过使用内部自由功能块实现起动/停止按钮对装置的控制:
(1)接线图:
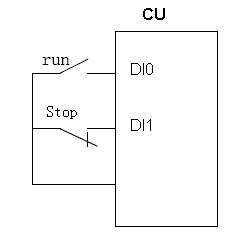 西门子IM153-1接口模块图1.
西门子IM153-1接口模块图1.
(2)激活自由功能块
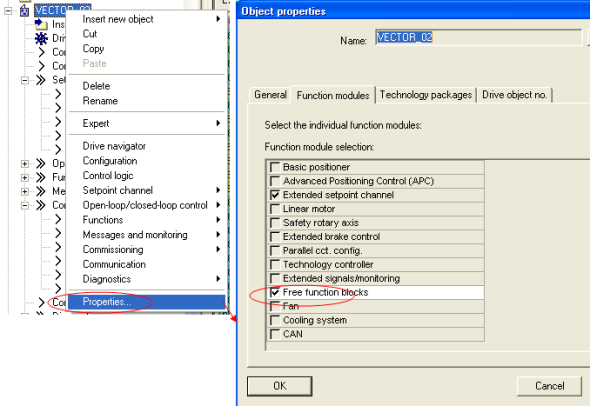
图2.
(3) 参数设置
使用自由功能块中的“非门”及“R-S触发器”如图3:

图3.
P20000[0]= 8:设置执行组0的采样时间
P20078= r722.1:设置DIN1为非门的输入
P20080= 0:将非门分配至执行组0
P20081= 1:设置非门在执行组0中的执行顺序中为1
P20188[0]= r722.0:设置RS触发器S触发信号的源
P20188[1]= r20079.0:设置RS触发器R触发信号的源
P20191= 0:将RS触发器分配至执行组0
P20192= 2:设置RS触发器在执行组0中的执行顺序为2
P0840= r20189.0:将RS触发器的输出与驱动的ON/OFF参数相关联
S120 支持与HMI进行直接通信,这样可以通过HMI直接控制s120的起停和设定,不过该种通信方式属于非周期通信,需要设置通信状态监控以便通信异常时变频器能够停车。下面以Winccflexible PC Runtime和S120(CU320 V2.6.2)为例,介绍HMI控制S120起停和通信状态监视的设置方法。
1 HMI侧的设置
1.1 HMI侧的通信设置
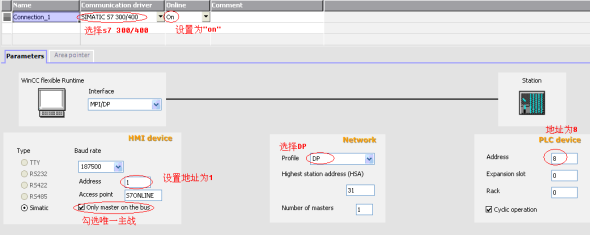
说明:
(1)通讯驱动选择“SIMATIC S7 300/400”并激活“ON”。
(2)HMI侧要勾选“only master on the bus”。
(3)设置双方的通信网络和站地址。
1.2 HMI侧创建变量标签

说明:
(1)DB号对应参数号,比如DB2098对应变频器内的P2098。
DBX号=DO号*1024+参数下标号,比如DBW3072对应DO03中的0号下标参数。
DO号可以在starter/scout软件的“communication”中找到。
(2)这里建立了三个参数:
“P2098_1”对应于变频器的P2098[0](用于控制启停);
“P2098_2”对应于变频器的P2098[1](用于接收HMI产生的脉冲);
“P2900”对应变频器的P2900用于速度给定。
1.3 HMI侧生成脉冲信号

说明:
(1) 点击画面窗口---事件---加载---选择“SimulateTag”函数;给该函数分配P2900_2变量,设置函数周期为2(时基是200mS),值为1,步长(value)为1.
该函数是用于仿真某个int型变量的变化,并且只能在画面加载事件中调用,在当前画面窗口激活,即当前窗口被显示时该函数被调用;若有多个画面则需在每个画面的加载事件中调用该函数,并做相同设置,否则切换画面时脉冲会丢失。
(2)这里设置的函数周期是2*200mS,而变量的刷新周期是500mS.这样可以保证变量每次
刷新时变量值都经过变化,同时变频器侧P2098[1]参数接收到脉冲信号的周期会足够
小,从而保证在设定的2S时间内检测到脉冲。
(3)变频器参数P2098[0]/P2098[1]是两个“WORD变量到BIT变量转换”的变量,转换后的变量会分别在r2094.0---r2094.15和r2095.0---r2095.15中显示并可进行BICO
连接。
(4)可作BICO连接的标有CI标识的P参数不能直接与HMI建立连接,r参数可以。
(5)其中,设置2S定时是因为周期通信中总线检测的可设时间为2S,见下图:

1.4 HMI侧的启停和给定设置

说明:
(1)给定的IO域连接到变量P2900对应于变频器参数P2900;
(2)点击启动按钮---事件---点击---翻转变量位(InverBitInTag)---连接变量P2098_1 (对应
于变频器参数P2098[0])---选择第0位。
2 变频器侧的设置
2.1通信只需要设置CU的站地址
2.2 参数设置、起停和给定的连接逻辑见下图:

变频器的参数连接为:西门子IM153-1接口模块P1070[0]=P2900
P840[0]=r2094.0(其中r2094.0自动连接到P2098[0].0)
其它相关参数请参见S120调试手册。

说明:P840[0]=r2094.0(r2094.0=P2098[0].0自动关联)

说明:P1070[0]=P2900(P2900对应变频器内的可设置固定值,可通过HMI更改)
2.3 通信诊断和响应处理
变频器侧的通信诊断及通信故障响应逻辑见下图:
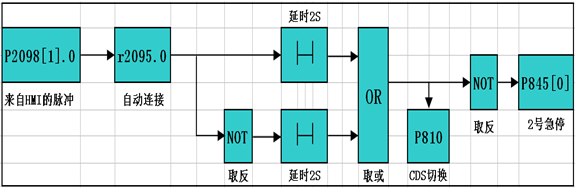
说明:
r2095.0是来自HMI的脉冲信号,检测该信号为常1或常0达到2S后,认为通信故障。
变频器OFF2停车,并切换命令参数组到端子或面板控制(由用户根据需要设置)。
2.4 变频器侧通信相关参数的设置
激活S120的自由功能块功能,方法如下:

说明:
(a) 右击“VECTOR_03”选属性---选择“function modules”---勾选自由功能块---OK。
(b) P20000[0]选择8*r20002。用于设置自由功能块执行组0的扫描时间,要求为
1ms。参数形式为N*r20002,其中r20002为时基,对于驱动对象其值一般0.125mS。
(1)设置PDE0(延时通定时器),用于检测r2095.0的信号在2S内是否为常1。
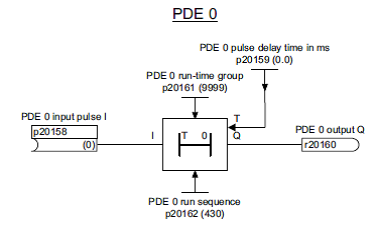
P20158= 2095.0(检测脉冲信号是否为常1)
P20161=0(选择执行组0)
P20162=1(在执行组0中的执行顺序为1)
P20159=2000(设定延时时间为2S)
r20160定时器0的输出,送给OR0输入1。
(2)设置NOT0功能块(对脉冲信号进行取反以检测常0信号)

P20078=R2095.0(脉冲信号)
P20080=0(在执行组0中执行)
P20081=2(在执行组0中的执行顺序为2)
r20079(取反后的信号输出,送给PDE1输入)
(3)设置PDE1(延时通定时器),用于检测r2095.0的信号在2S内是否为常0。

P20163= R20079 (检测脉冲信号是否为常0)
P20166=0(选择执行组0)
P20167=3(在执行组0中的执行顺序为3)
P20164=2000(设定延时时间为2S)
r20165定时器1的输出,送给OR0的输入2
(4)设置OR0功能块(将常1和常0检测结果相或)

P20046[0]= R20160 (常1检测结果)
P20046[1]= R20165(常0检测结果)
P20046[2]=0
P20046[3]= 0
P20048=0(在执行组0中执行)
P20049=4(在执行组0中的执行顺序为4)
R20047或信号的输出。该信号一方面直接送给P810用于切换命令组;另一方面送
给NOT1的输入。
(5)设置NOT1功能块,对检测结果取反后送给OFF2停车源2(P845[0])

P20082= r20047 (取自OR0输出)
P20084=0(选择执行组0)
P20085=5(在执行组0中的执行顺序为5)
r20083 NOT1的输出,送给OFF2停车源2(P845[0])
(6)最终信号连接
P845[0]= R20083( NOT1的输出信号)
P810= r20047(OR0的输出信号)
即当检测到通信故障时,变频器OFF2停车,以保证设备和人身安全;同时将命
令数据组2激活,若设置了其它命令数据组,则可避免因通信故障而导致变频器无
法运行。
其它相关参数设置请参考S120参数手册。
西门子IM153-1接口模块