
西门子6SL3040-0PA00-0AA1
发布时间:2018/5/15 9:13:00西门子6SL3040-0PA00-0AA1
6SL3040-0PA00-0AA1控制单元适配器 CUA31 针对功率模块 PM340
1 概述
SINAMICS V90是西门子推出的一款小型、高效便捷的伺服系统。SINAMICS V90 驱动器与SIMOTICS S-1FL6 电机组成的伺服系统是面向标准通用伺服市场的驱动产品,覆盖0.05kW~7kw功率范围。2016年7月底,推出了带PROFINET接口的V90驱动器,配合SIEMENS PLC, 能够组成一套完善的、经济的、可靠的运动控制解决方案, 轻松实现位置控制,速度控制,扭矩控制等多种控制方式。
SINAMICS V90 PROFINET (PN) 版本有2个 RJ45接口用于与PLC的 PROFINET通信连接,支持PROFIdriver 运动控制协议。它也可以集成到博途中与S7-1200,S7-1500连接。博途V14版本后,它还可以与S7 1500 T-CPU 连接,可用于复杂的运动控制系统。
2 产品信息
V90 PN产品如图2-1所示。

图2-1 V90 PN产品
SINAMICS V90进线电线为1/3 AC 200V到240V低惯量高动态响应产品信息如表2-1所示。
进线电压 | 1AC 200 V 到 240 V (-15%/10%), 0.05 kW to 0.75 kW 3AC 200 V到240 V (-15%/10%), 0.05 kW to 2 kW |
控制模式 | 速度控制模式:与SIMATIC S7-1500 / S7-1200连接,组态TO可实现速度或位置控制 |
通信 | PROFINET |
防护等级 | IP20 |
伺服电机 | SIMOTICS S-1FL6 低转动惯量,轴高为 20mm,30mm,40mm |
表2-1 SINAMICS V90进线电线为1/3 AC 200V到240V低惯量高动态响应产品信息如表
SINAMICS V90进线电线为3AC 380V到480V高惯量适用于平稳运行性能,产品信息如表2-2所示。
进线电压 | 3AC 380 V 到 480 V (-15%/10%), 0.4 kW 到 7 kW |
控制模式 | 速度控制模式:与SIMATIC S7-1500 / S7-1200连接,组态TO可实现速度或位置控制 |
通信 | PROFINET |
防护等级 | IP20 |
伺服电机 | SIMOTICS S-1FL6 高转动惯量,轴高为 45mm,65mm,95mm |
表2-2 SINAMICS V90进线电线为3AC 380V到480V高惯量产品信息
V90 PN重要信息及限制:
(1) 不支持驱动中的IPos控制方式,不支持SIMATIC控制器的SINA_POS 功能块,只支持SINA_SPEED 功能块。
(2) SINAMICS V90 PN支持SIMATIC PLC的工艺对象(TO),可通过TO实现位置及速度的控制,如S7-1500 T-CPU, S7-1500及S7-1200。
(3) 机器的动态响应与负载及电机的转动惯量比有关,建议不要大于5:1。对于低速运行、高或高动态响应的应用,不建议选择TTL编码器的电机。
(4) SINAMICS V90 PN 版本的是独立于当前的SINAMCIS V90 脉冲串的控制器,它不支持PTI,脉冲加方向,模拟量,USS/Modbus RTU通信控制方式。
(5) V90 PN只支持PROFINET通信,支持西门子标准报文1,2,3,5,102,105,支持DSC控制。
1 V90 概述
SINAMICS V90是西门子推出的一款小型、高效便捷的伺服系统。它作为 SINAMICS 驱动系列家族的新成员,与SIMOTICS S-1FL6 伺服电机完美结合,组成的伺服驱动系统,实现位置控制、速度控制和扭矩控制。通过优化的设计,SINAMICS V90 确保了卓越的伺服控制性能,经济实用、稳定可靠,能用于贴标机、包装机、压边机等等伺服控制系统。
2 进线电压及功率范围
SINAMICS V90 200V系列:
伺服控制器进线电压为1/3 AC 200V~240V,功率范围从0.1kW ~ 2kW,与低惯量的1FL6电机相匹配。低惯量1FL6电机有8个功率段,4种轴高,功率从0.05kW ~ 2kW,额定转矩范围0.16~6.37Nm。
SINAMICS V90 400V系列:
伺服控制器进线电压为380V~480V,功率范围从0.4~7Kw,与高惯量的1FL6电机相匹配。高惯量1FL6电机有11 个功率段,3种轴高,功率从0.4kW ~ 7kW,额定转矩范围从1.27~33.4Nm。
SINAMICS V90伺服控制器与1FL6电机对应关系如表1所示。
注意:必须严格按照图2-1中的对应关系选择驱动器。如果驱动器和电机不匹配将无法使用。

表1 V90与1FL6对应关系
1 问题描述
标准接线下,Sinamics V90伺服驱动器的数字量输入是高电平有效如图1-1所示,在某些应用中需要Sinamics V90伺服驱动器的数字量输入低电平有效,本文介绍了具体实现方法。
西门子6SL3040-0PA00-0AA1
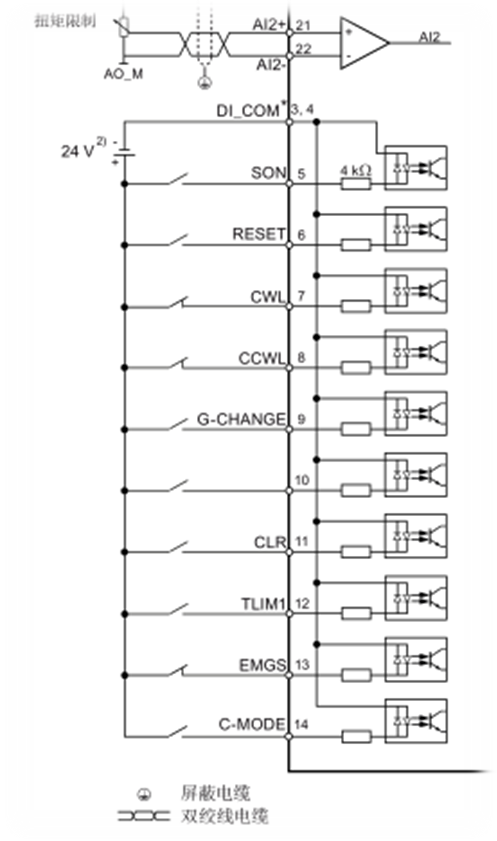
图1-1 数字量输入为高电平输入有效的连接
2 解决方案
可以通过调整接线的方式来实现Sinamics V90伺服驱动器的数字量输入低电平有效,具体接线方式如图2-1。
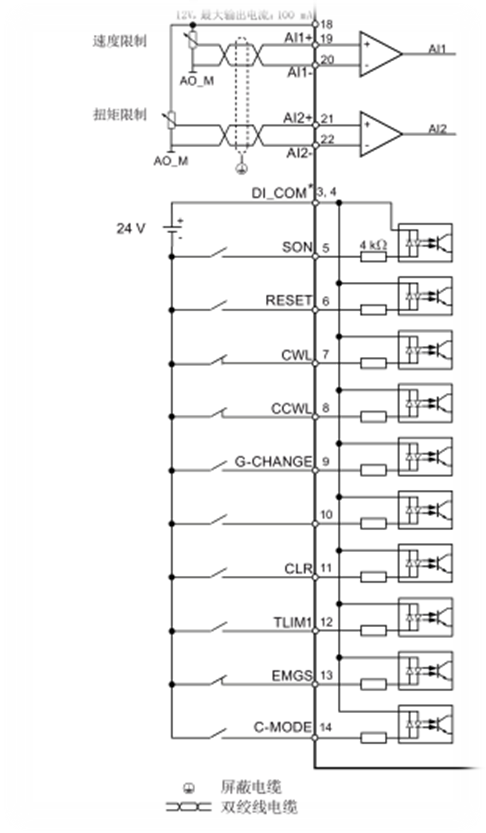
图2-1数字量输入为低电平输入有效的连接
1.电子齿轮比
1.1 电子齿轮比的作用
电子齿轮比就是对伺服接收到的上位机脉冲频率进行放大或者缩小。其中一个参数为分子,为电机编码器的分辨率;一个为分母,为电机旋转一圈所需要的脉冲数。如果分子大于分母就是放大,如果分子小于分母就是缩小。
在 实际应用中,连接不同的机械结构,移动单位量所需的电机转动量是不同的,例如:同样一个伺服电机,如果连接了一个螺距为10mm的丝杠,那么电机转一 圈机械移动10mm,每移动0.001mm就需要电机转1/10000圈;而如果连接螺距为5mm的丝杠,每移动0.001mm需要电机转1/5000 圈。而电机编码器的分辨率是相同的,因此可以通过设置电子齿轮比来使电机脉冲数和机械移动量相匹配,这就是电子齿轮比的作用。 1.2 相关概念介绍
(1)编码器分辨率:伺服电机轴旋转编码器反馈脉冲数。
V90的伺服电机有增量编码器和编码器,其分辨率如下图:
图01. V90伺服电机编码器的分辨率
(2)每转脉冲数:丝杠转动一圈所需脉冲数。
(3)长度单位(LU):上位机发出一个脉冲时,丝杠移动的直线距离或旋转轴转动的度数,也是控制系统所能控制的距离。这个值越小,经各种补偿后越容易得到更高的加工和表面质量。当进给速度满足要求的情况下,可以设定较小的长度单位。也称作“脉冲当量”。
(4)螺距:螺纹上相邻两牙对应点之间的轴向距离。
2.1 V90电子齿轮比的设置
V90电子齿轮比的设置方法如图2所示:
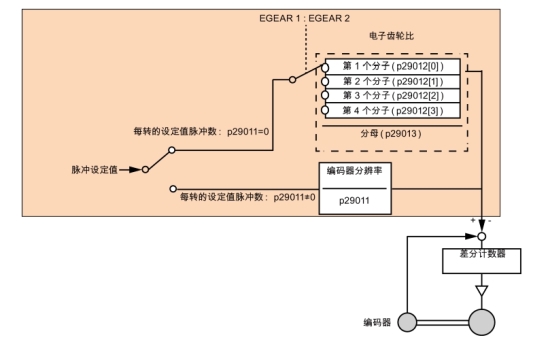 图02. V90的电子齿轮比设置
图02. V90的电子齿轮比设置
从图中可以看出V90的电子齿轮比的设置有两种方法,这两种方法的本质都是算出编码器分辨率与期望每转脉冲数的比值。
(1)电子齿轮比=编码器分辨率 / P29011。P29011即为期望每转脉冲数;
(2)当P29011设定为0时,电子齿轮比=P29012 / P29013。
这几个参数的说明如图3所示: 
图03. 相关参数说明
四个电子齿轮比分子可通过数字量输入信号的组合EGEAR1和EGEAR2来选择,如图4所示:

图4. 电子齿轮比分子的选择
还有两点需要注意的是:
(1)电子齿轮比的取值范围是0.02到200;
(2)仅可在伺服关闭状态下设置电子齿轮比。
2.2电子齿轮比的计算及举例
比如有一套机械系统,如图5所示: 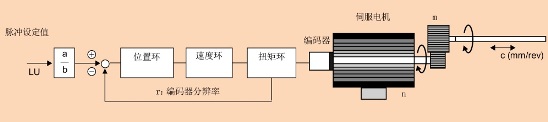
图05. 机械系统
其中:a/b为电子齿轮比;
LU为长度单位;
r为编码器分辨率;
i= n/m为机械减速比(n电机侧转速,m负载侧转速);
c为丝杠螺距。
那么期望每转脉冲数d的计算:

电子齿轮比计算:

计算电子齿轮比的实例:

图06. 电子齿轮比计算实例
再比如:
PLC的脉冲频率为200KHz,电机的额定转速为3000rpm,伺服电机编码器分辨率是524288;丝杠螺距是10mm(没有减速箱)。
问:如果电子齿轮比是1,伺服电机的转速?
答:PLC 控制伺服电机能达到的转速=200×1000×60/524288=22.89rpm
问:PLC发出脉冲频率,如何通过设置V90的电子齿轮比才能让电机以额定转速运行?
答:电机额定转速3000rpm=50r/s,50r/s时的脉冲频率:50×524288=26214400,
因此电子齿轮比=26214400/(200×1000)=524288/4000(设置P29011=4000)。 附:

图07. 西门子PLC的脉冲频率
问题:怎样将驱动中的DSC功能关闭?
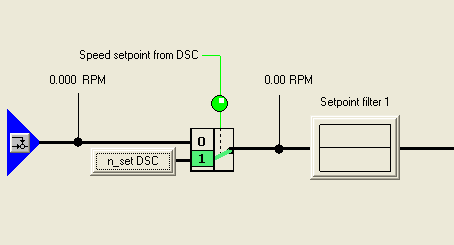
对伺服轴进行组态时,如果选择报文105,那么系统默认DSC功能被激活,当启动轴时,系统的速度给定自动切换到DSC,如下图所示:
即使再将报文恢复到自由报文999等其它形式,DSC功能不能被自动禁止,如何解决此问题呢?
回答:在Starter的组态界面中,速度的走向描述是不准确的,例如当我们将报文从105修改为999后,此时DSC功能已经关闭,但如果在Starter页面里观察时,速度仍然来自n_set DSC,如下图所示,事实上我们可以看出,此时实际速度并不来自于n_set DSC,而是来自于前面的速度设定通道。
另外我们发现参数P1190、P1191对图像的显示是有影响的,如果这两个参数都定义为非零值,DSC显示激活,如果两个参数都设置为0%,则DSC显示关闭。
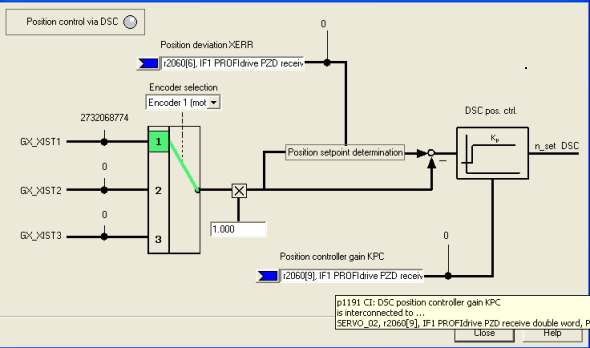
综上所述,DSC的激活是否仅取决于报文设置参数P922,而与图形的显示没有关系。
西门子6SL3040-0PA00-0AA1