
西门子6SL3040-0MA00-0AA1
发布时间:2018/5/15 8:54:00西门子6SL3040-0MA00-0AA1
6SL3040-0MA00-0AA1SINAMICS 控制单元 CU320 不带 CF 卡
1、概述
优化电机功能可以在项目配置中选择,配置结束后通过施加使能命令开始优化;也可以在项目配置结束后,通过参数方式完成。
> 如有必要需对变频器先进行参数工厂复位(P0010=30、P0970=1)。
优化顺序:
1).完成项目配置并依照电机铭牌正确输入电机额定数据及编码器类型
2).执行电机数据计算P340
3).电机数据静态辨识P1910
4).依照实际工艺要求使用STARTER 中的Trace 功能调整速度环参数(调试方法参照《SINAMICS S120 快速入门》)
5).电机数据及控制数据动态优化P1960
电机优化条件:电机冷态,抱闸没有闭合、有效措施确保机械系统无危险
2、优化过程
a.电机数据计算
P340是基于电机铭牌数据的计算(定/转子阻抗感抗等)该过程不必使能变频器。计算结束后P340自动恢复为0。
b.电机数据静态辨识
P1910用于电机数据静态辨识,该过程需要使能变频器。辨识过程中
1. 变频器有输出电压,输出电流,
2. 电机可能转动210?
P1910 = -3 接受识别结果
P1910 = -2 辨识过程中,若变频器发现编码器反向则报故障F07933,此时应检查电机或编码器方向若正确则设定P1910= -2接受正确方向。若不正确则需修改电机接线并重新执行辨识过程。
P1910 = -1数据辨识但不接受
P1910 = 0 禁止数据辨识
P1910 = 1 数据辨识并接受辨识结果
P1910=1 将计算:定子冷态阻抗P350、转子冷态阻抗P354、定子漏感P356、转子漏感P358、主电感P360。
电机数据静态辨识步骤:
i. 设P1910=1
ii. 使能 ON/OFF1
辨识结束后P1910自动恢复为0
速度环动态特性的优化:
依照实际工艺要求使用STARTER 中的Trace 功能优化速度P1460/P1470、P1662/P1472(调试方法参照《SINAMICS S120 快速入门》)
c.电机数据动态辨识
电机数据动态辨识由P1959 + P1960配合使用
出厂默认值P1959. 1、2、5、6、7、9、10 都已激活
P1960 = -3 接受识别结果
P1960 = -2 辨识过程中,若变频器发现编码器反向则报故障F07933,此时应检查电机或编码器方向若正确则设定P1910= -2接受正确方向。若不正确则需修改电机接线并重新执行辨识过程。
P1960 = -1数据辨识但不接受
P1960 = 0 禁止数据辨识
P1960 = 1 数据辨识并接受辨识结果
电机数据动态辨识,需要使能变频器。辨识过程将完成:
? 计算磁化曲线
? 计算系统转动惯量与电机转动惯量比例(P342)等
动态辨识步骤:
1. 电机空载以计算电机动态数据(如电机的转动惯量等)。
2. 电机带载优化,带载后系统总的转动惯量等发生变化需执行p1959=4, P1960=1以完成动态优化。
3. 如果项目配置时选择了扩展的给定通道(Extended Setpoint)斜坡函数发生器有效,建议在做空载优化时通过设置P1958=0 取消(P1958仅在电机数据动态辨识时有效),同时不要使用旋转方向禁止功能P1959.14=1、P1959.15=1。
4. 若电机带载后需要测试系统转动惯量,则需根据负载及机械设备的实际情况设定斜坡上升下降时间P1958≠0,然后执行P1960=1、P1958=4,优化过程中只有电流及速度限幅有效。
5. 选择优化项目
设P1960+P1959
使能 ON/OFF1
电机辨识过程中电机会加速至转速,优化过程中只有电流P640和转速P1082有效,辨识结束后P1960自动恢复为0。
注:若机械系统没有条件执行电机空载优化,可直接进行带载优化,此时必须考虑机械条件限制如:
机械负载惯性
机械强度
运动速度
位移的限制等
对于前三种情况(机械负载惯性、机械强度、运动速度)可适当调整P1958、P640、P1082,通过使用斜坡上升/下降时间、速度限制、电流限制来减少机械承受的压力做辅助保护。
对于第四种情况(机械位置有限制)则不做动态优化或可通过P1959.14和P1959.15做限位。
优化完成后必须存储参数到CF卡上:
可通过STARTER调试软件执行 copy RAM to ROM或设定参数P971=1、P977=1
S120驱动第三方伺服电机必要的电机数据:
P305、P311、P314、P316、P322、P323、P400、P341、P350、P353、P356
1 概述
S120驱动系统驱动第三方同步伺服电机时,需要确定电气磁极位置。对于具有位置信息(如带有编码器或带有C/D信号的增量编码器,或带有两极旋转变压器)且已经进行机械校准的同步电机不需要进行磁极位置识别。除此之外的以下情况均需进行磁极位置识别:
1. 未进行机械校准的具有位置信息的同步电机
2. 带有增量编码器(无C/D信号)的同步电机
3. 带有多极旋转变压器的同步电机
4. 更换了编码器的同步电机
5. 不带编码器的同步电机
2 磁极位置识别方法和步骤
对于第三方具有位置信息的同步伺服电机和更换了编码器或带有C/D信号的增量编码器或两极旋转变压器的同步电机需要进行性磁极位置识别,设置如下:
1. 通过 p1980 选择一个方法。
2. 设置 p1990 = 1,启动性磁极位置识别。
---在给出下一个脉冲使能信号时会执行测量,并将测出的角度差(p1984)记录在p0431 中,辨识完成后P1990会自动变回0。需要执行“copy RAM to ROM”的操作以保存参数。
对于带有增量编码器(无C/D信号)或多极旋转变压器的同步电机以及不带编码器的第三方同步伺服电机需要进行磁极位置识别,设置如下:
1. 通过 p1980 选择一个方法。
2. 设置 p1982 = 1,启动磁极位置识别。
---在每给出脉冲使能信号后都会执行磁极位置识别。
1 系统概述
MASTERDIVE 家族的6SE70系列变频器包含VC和 MC两种变频器。
MC 专门应用于运动控制系统,广泛应用于精加工行业:车床,印刷,纺织,机械加工等。
使用MC控制器可实现如下功能:
?? 速度控制
?? 位置控制
?? 装置之间的角同步控制
MC中包含模块化的软件设计:
?? 强大的自由功能块(包含基本定位功能)
?? 工艺软件包F01
MC系统的功率部分与VC的功率部分相同,按照不同装置结构可划分为(见图1):

图1
其中增强书本型装置,控制板与功率元件为一体,以得到更加紧凑的结构,而书本型装置和装机装柜型装置则拥有独立的电子箱,控制板可以插拔,方便更换。更换书本型或装机装柜型装置的控制板后,操作如下:

图2
2 编码器的使用
MC要实现定位控制,需要使用编码器作为速度和位置的反馈信号。
编码器在安装使用上分为电机编码器,外部编码器。二者可以同时使用,也可以单独使用。
电机编码器,安装在电机轴上,可以测量电机的转速以及电机的位置,同时可以通过机械设备的变比关系,反映出机械设备的位置。
外部编码器,安装在机械设备上,用于检测设备的位置,可以更准确地反映最终机械设备的位置。
电机编码器需要将编码器板装在C槽。
可以使用的编码器类型,以及编码器接口模板如图3所示
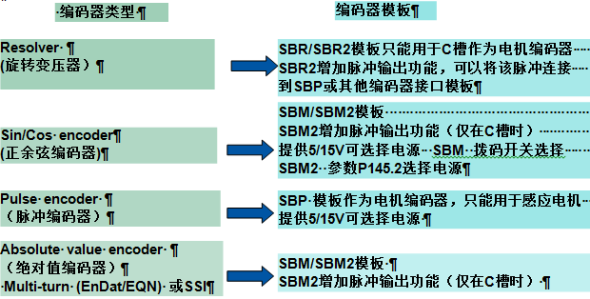
图3
3 电机类型
MC控制器可以驱动同步电机,异步电机, 类型通过P095进行选择。(图4)

图4
注意:
在使用永磁同步电机时,需要注意转子零点的问题。
西门子标准同步伺服电机在出厂时,已经保证编码器的零点与转子零点对应,此时需要保证动力电缆的相序U,V,W与变频器的输出相序相同。
对于没有确定转子极位置的同步电机,或者用户自己更换了编码器,需要进行转子零点的校正,否则会导致电机失控。
4 系统设定
4.1 恢复工厂设定
次使用MC控制器,首先进行参数的工厂复位,保证参数恢复到工厂设定值。
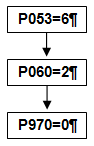
图5
4.2使用西门子标准电机时的系统参数设定

图6西门子6SL3040-0MA00-0AA1
4.3 第三方电机设定
当使用第三方电机时,如果用户想要使用标准的控制方案则需要首先进行下列操作。
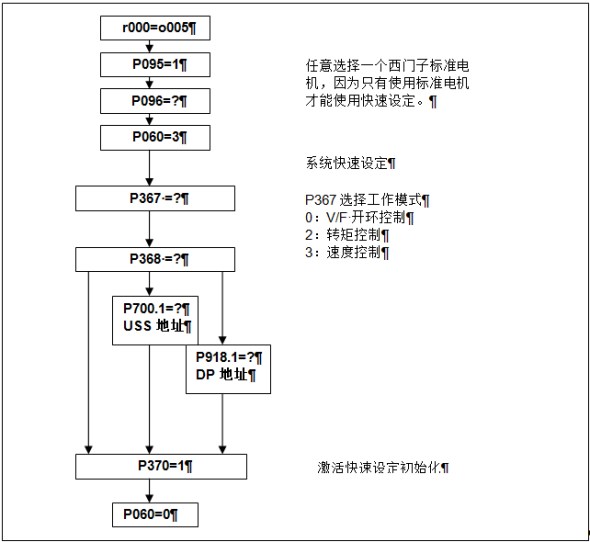
图7

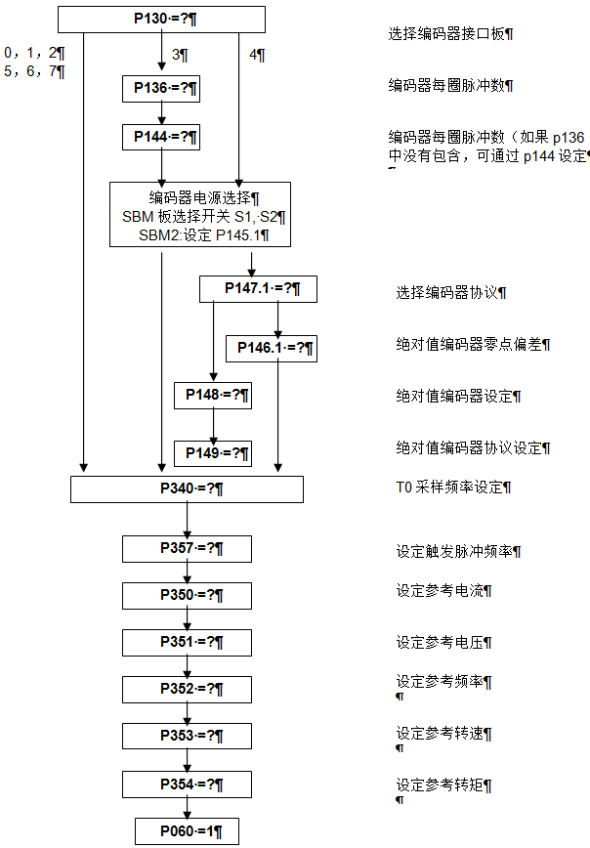
图8
由于第三方电机通常不提供电机的阻抗等参数,所以需要进行优化来寻找这些电机的参数:

图9
5 系统标准配置(p368)
p368=1 端子控制
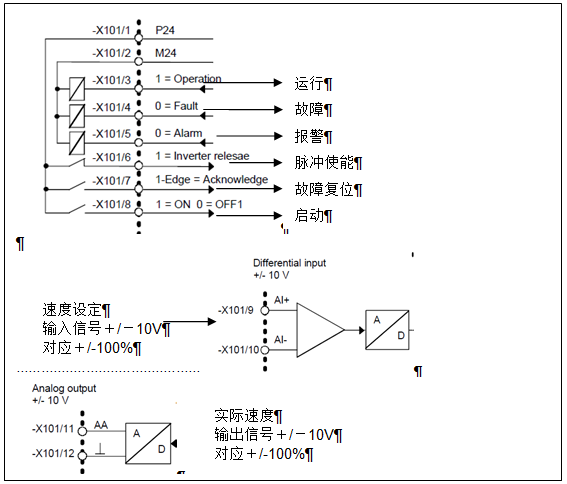
图10
p368=2端子和固定频率设定控制
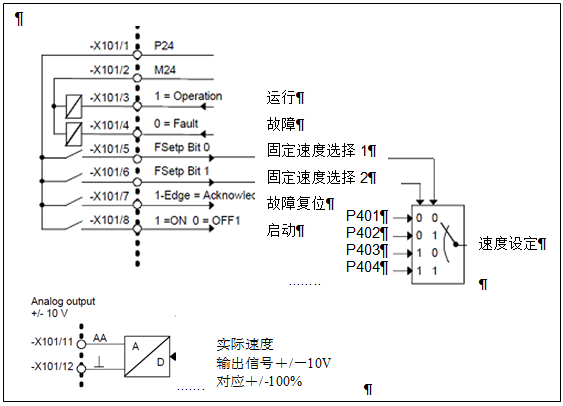
图11
p368=3端子和电动电位计设定控制

图12
p368=0 PMU面板控制(仅对于书本型和装机装柜型装置)

图13
p368=4 USS通讯控制

图14
p368=6 PROFIBUS DP 通讯控制

图15
6 DriveMonitor软件调试
打开软件,设置连接端口:
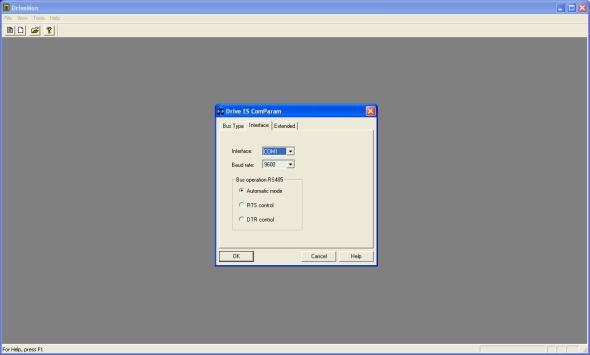
图16
选择装置类型,建立参数表:

图17
进入参数表,选择在线连接按钮:

图18
打开屏幕下部工具栏的操作面板:

图19
激活主控请求,可以通过该操作面板进行控制(必须首先完成系统参数设定)

图20
7 激活位置控制器
在保证速度模式能正常工作后,如果需要使用MC系统的定位功能,则需要手动激活位置控制器。
设定P210=1即可。通常采用的定位方式有如下三种:
1.? 直接位置控制
在该方式下,通过参数P209设定目标位置,在启动命令后,电机直接运行到目标位置,该模式比较简单,但是容易产生冲击,因此在设定目标位置的时候,尽量将设定位置经过斜坡发生器的方式作为给定,以避免位置设定的阶跃。
2. ?基本定位功能
在MC的自由功能块中,专门开发了基本定位功能,可以实现一些简单的定位操作,能够满足绝大部分的定位控制。详细操作及描述见基本定位功能简单调试手册。
3.? F01工艺软件
在MC中同时集成了更加全面的定位控制工艺包,可以满足多种复杂的定位控制要求,但是要使用该软件包,需要购买授权码,来激活该工艺包。关于F01工艺软件的使用,请参考F01简单调试手册。
西门子6SL3040-0MA00-0AA1