
机械人城市地下综合管廊有毒有害气体监测系统方案
发布时间:2016/9/1 17:40:00机械人城市地下综合管廊有毒有害气体监测系统方案


一、概述
在我国,石油、化工、煤炭、从事非常规、非连续作业的有限空间(如炉、塔、釜、槽车以及管道、烟道、隧道、下水道、沟、坑、井、池、涵洞、船舱、地下仓库、储藏室、地窖、谷仓等)等行业有毒气体泄漏时有发生,对人身安全的威胁也越来越大,这些灾难发生后,由于现场环境的复杂性和危险性,救援工作往往很难开展,也给救援队员的生命安全带来很大隐患。因此需要一种能够代替救援队员深入到危险区域并探测现场有用信息的监测机器人。 目前工业应用领域的有害气体检测仪器大多是固定式或便携式的。使用固定式检测仪器,只能在安装点及其附近进行数据测量,检测范围小,局限性大;使用便携式检测仪器,仍需人员手持到现场进行操作。在石油、化工、煤炭、从事非常规、非连续作业的有限空间(如炉、塔、釜、槽车以及管道、烟道、隧道、下水道、沟、坑、井、池、涵洞、船舱、地下仓库、储藏室、地窖、谷仓等)等行业,生产车间在发生气体泄漏后,现场环境变得高危,不宜人员进入,而做出及时、正确的判断和决定又依赖于及时、准确的事故现场数据。还有一些本身就需在高危环境下进行生产的特种行业,如多晶硅行业,钒钛行业等,在这些行业的生产车间人员巡检困难、投入大、人员安全不能得到有效保障。 基于上述情况设计了有害气体监测机器人,可以使用此平台对现场有害气体浓度、环境温度等参数进行巡检。主要着重于有害气体监测机器人的数据检测与视频实时传输功能,实现将现场的数据实时传送给指挥中心。 机械人的检测系统分为既定巡检和手动巡检两种工作模式。既定巡检模式下,机器人可以在车间按指定路线行进,实时检测沿线有害气体浓度和环境温度,获取现场实时图像,通过无线技术将数据上传至上位机,实现自动检测自动报警等功能。在有害气体超标或环境温度异常的情况下会报警,将异常数据上报至上位机,自动切换为手动模式。手动巡检模式下,控制人员可以在控制室通过上位机远程控制移动监测装置的运动路径,在需要检测的地点获取实时参数和现场图像。它是一种在企业自动化生产和自动化巡检系统中的自动控制系统。 有害气体监测机器人包括硬件电路制作和软件开发。 硬件方面,对监测装置的电路进行了模块化处理,监测装置主要由控制器模块、传感器模块(SKA/NE-7气体浓度传感器模块、温度传感器模块)、图像采集模块、无线通信模块、电机驱动模块、电源模块组成。主要用于对传感器模块采集的PM2.5、气体浓度和摄像头采集的现场图像数据进行分析和处理,输出信号去控制电机驱动模块,从而完成对机器人的前进、后退、左转、右转、现场有害气体的检测、温度的实时测量、现场图像的抓拍和无线传输数据的控制。
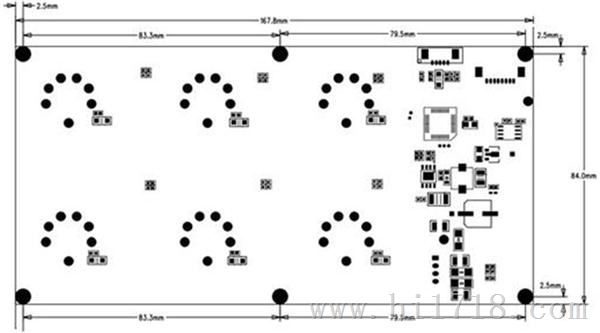
二、实物图及尺寸


三、参数
|
气体类型 |
量程 |
|
响应时间 |
供电 |
输出 |
|
甲烷 |
0-100%LEL |
2%FS |
15s |
5V |
RS485/TTL |
|
一氧化碳 |
0-1000ppm |
25%FS |
15s |
5V |
RS485/TTL |
|
硫化氢 |
0-50ppm |
2%FS |
15s |
5V |
RS485/TTL |
|
二氧化碳 |
0-10%VOL |
2%FS |
15s |
5V |
RS485/TTL |
|
氧气 |
0-30%VOL |
2%FS |
15s |
5V |
RS485/TTL |
|
氨气 |
0-100ppm |
2%FS |
15s |
5V |
RS485/TTL |