
HZD-B-8B-ZP-A5 0-20mm/s振动变送器
价格:电议
地区:安徽省 滁州市
电 话:0550-7611877
手 机:15155047988
传 真:0550-7530378/18055097177/15855093488



图文详情
产品属性
相关推荐
一体化振动变送器HZD-B-8B-ZP-A5 0-20mm/s DC24V 垂直或水平
安徽万珑振动变送器HZD-B-9GW-A1-B1-C1-D2振动传感器采购-三参数振动探头,0—500μm0—200℃,0.05,24VDC,国产双通道振动监视仪CZJ-B4G-A02-B01-C01量程0~200um HZD-B-8B-ZP-A5 0-20mm/s DC24V 垂直或水平HZD-B-8B-ZP-A2 0-200um安徽万珑电气HZD-B-8B-ZP-A5 0-20mm/s DC24V 垂直或水平振动变送器万珑电气讲信用一体化变送器震动传感器 4-20mA风机泵测振传感器汽轮 0-300um振动监测器1-08-100-1-1-0 *-1-08-100-1-1-0,0-100um=4-20mA,电源24VDC;双级MVR压缩机用;磁电式振动速度传感器TRLV-80-200um/s24VDC振动变送器TR2061-1-A020-1-0.量程0-20mm/s;VS-068/VS-069/VS-077/VS-079/VS-080/VS-1gVRS2021,VRS2022,VRS2011,VRS2012振动位移烈度变送器振动传感器\CIJ13500-08 量程0-2mm 5m铠装电缆 壳体80mm位移传感器\LVDT5000TD 0-250mm振动探头\330103-02-05-10-02-05HZD-B-9A量程:0~20.0mm/s,电源:DC24V离心机振动传感器一体式测振探头20mv\/mm\/s产品RHYT-8L输出4~20MA量程0-200um, 固定螺孔M10*1RHS-2H 5~1000HZ 固定螺孔M10*1.5*10深度振动监测保护仪 RHMS-758G 双通道0-200um DC24VHZD-Z-6A-A2-B2-C2-D2安徽万珑电气智能振动监视仪TC3012-M-BT台158,5411018振动速度传感器TC-TZD-9-TS振动/速度/加速度传感器震动变送器STM652-3-R020-00 RPM Sensor,Model : SZMB-M16*1.5/L100振动温度传感器 ZHT-201-10-01M16*1.5*14mm深35mm电涡流两线制振动变送器探头TS-CWY-D0-中8-02-60-130-10100-10电涡流两线制振动变送器延伸电缆TS-CWY-D0-Ф8-40-01-00安徽万珑电气
应用领域
安徽万珑电气系列一体化振动变送器可广泛用于风机、汽轮机组、磨煤机、制氧机、发电机、离心机、压缩机、水泵、电机等旋转机械的轴承振动测量与实时监控。
概述
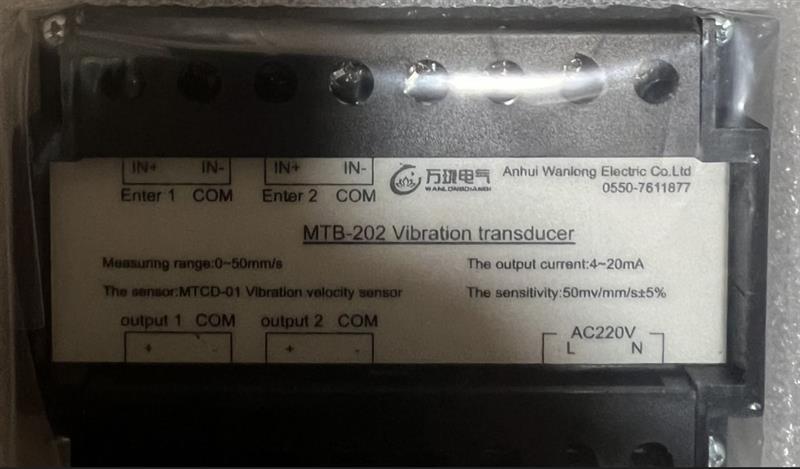
一体化振动变送器是将振动传感器和信号调节电路集成为一体的振动变送器, 能将现场采集到的振动信号直接变换为4~20mA电流信号输出。输出信号可直接传送至可编程控制器(PLC),集散控系统(DCS)监视器、采集器、记录仪或其他监控设备。
本产品采用高档电子器件,应用先进的贴片工艺,使产品结构紧凑,大大缩小了重量和体积,降低了功耗,同时由于传感器和处理电路集成一体,避免了信号的长距离传输,从而提高了抗干扰性能。
旋转机械振动按机械振动性质可分为3类:
一、强迫振动
强迫振动又称同步振动,是由外界持续周期性激振力作用而引起的振动。强迫振动从外界不断的获得能量来补偿阻尼所消耗的能量,使系统始终保持持续的等幅振动。该振动反过来并不影响扰动力。产生强迫振动的主要原因有转子质量的不平衡、联轴器不对中、转子的静摩擦、机械部件松动、转子部件或轴承破损等。强迫振动的特征频率总是等于扰动力的频率。例如,由于转子质量不平衡引起的强迫振动,其振动频率恒等于转速频率。
二、自激振动
机器运行过程中由机械内部运动本身产生的交变力引起的振动叫自激振动,一旦振动停止,交变力也自然消失;自激振动频率即机械的固有频率(或临界频率),与外来激励的频率无关。旋转机械中常见的自激振动有油膜涡动和油膜振荡。它主要由转子内阻、动静部件的干摩擦等引起。与强迫振动相比,自激振动出现比较突然,振动的强度比较严重,短时间内就会对机器造成严重破坏。
三、非定常强迫振动
非定强迫振动是由外来扰动力引起的一种强迫振动。其特点是与扰动力具有相同的频率;振动本身反过来会影响扰动力的大小与相位;振动的幅值和相位都是变化的。比如转子轴上某一部位出现不均匀的热变形,就相当于给转子增加了不平衡质量,它将会使振动的幅值和相位都发生变化。反过来,振动幅值和相位的变化影响不均匀热变形的大小与部位,从而使强迫振动连续不断的发生变化。
为了避免机器因振动过大而造成损坏,我公司推出了多款振动监测仪表和振动变送器。可以对旋转机械进行在线监测,更有效的指导设备的维修管理,将早期的事后维修方式和计划维修方式发展为预知维修,可让机器在有限的使用寿命期内创造大的价值。
1.按振动产生的原因分类
(1)自由振动:通常指弹性系统在偏离平衡状态后,不再受到外界激励的情形下所产生的振动。
(2)强迫振动:指弹性系统在受外界控制的激励作用下发生的振动。这种激励不会因振动被抑制而消失。
(3)自激振动:指弹性系统在受系统振动本身控制的激励作用下发生的振动。在适合的反馈作用下,系统会自动的激起定幅振动。一旦振动被抑制,激励也随之消失。
(4)参激振动:指激励方式是通过周期的或随机的改变系统的特性参量来实现的振动
2.按振动的规律分类
(1)确定振动:能用明确的数学关系式表达其运动规律的振动。确定振动又可分为周期振动和非周期振动。
周期振动可细分为最简单的周期振动即简谐振动和一般周期振动;非周期振动可细分为准周期振动和瞬态振动
一般周期振动是由多个乃至无穷多个频率成分(频率不同的简谐振动)叠加所组成,叠加后存在公共周期。注意只有频率之比为有理数的多个简谐振动叠加后才有公共周期。
准周期振动也是由多个简谐振动叠加的振动,但叠加后不存在公共周期。注意当频率比不是有理数时叠加后不存在公共周期,故为准周期振动。例如频率为3Hz和√2Hz的两个简谐振动叠加后显然不存在公共周期,故叠加后的振动为准周期振动。
(2)随机振动:不能用明确的数学关系式来表达其运动规律,而只能用统计方法来研究的非周期振动,也称非确定振动。
如前所述,按振动的规律的分类和按激励性质分类是类似的
3.按振动位移的特征分类
(1)横向振动:振动体上的质点在垂直于轴线的方向产生位移的振动。
(2)纵向振动:振动体的质点沿轴线方向产生位移的振动。横向振动和纵向振动统称为直线振动。
(3)扭转振动:振动体上的质点沿轴线方向产生位移的振动。扭转振动又称为直线振动。
(4)摆振动:振动体上的质点在平衡位置附近做弧线运动。
4.按振动系统自由度的数目分类
(1)单自由度系统的振动:只需要一个独立坐标就能够确定系统在振动过程中任何瞬时的几何位置的振动
(2)多自由度系统的振动:需要多个独立坐标才能够确定系统在振动过程中任何瞬时的几何位置的振动。
(3)弹性体振动:需要无限多个坐标才能确定系统在振动过程中任何瞬时的几何位置的振动,又称无限多自由度系统的振动
5.按振动系统结构参数的特性分类
(1)线性振动:振动系统的惯性力、阻尼力、弹性恢复力分别与加速度、速度、位移成线性关系,能够用常系数线性微分方程表述的振动。
(2)非线性振动:振动系统的阻尼力或弹性恢复力具有非线性性质,只能用非线性微分方程表述的振动。
