




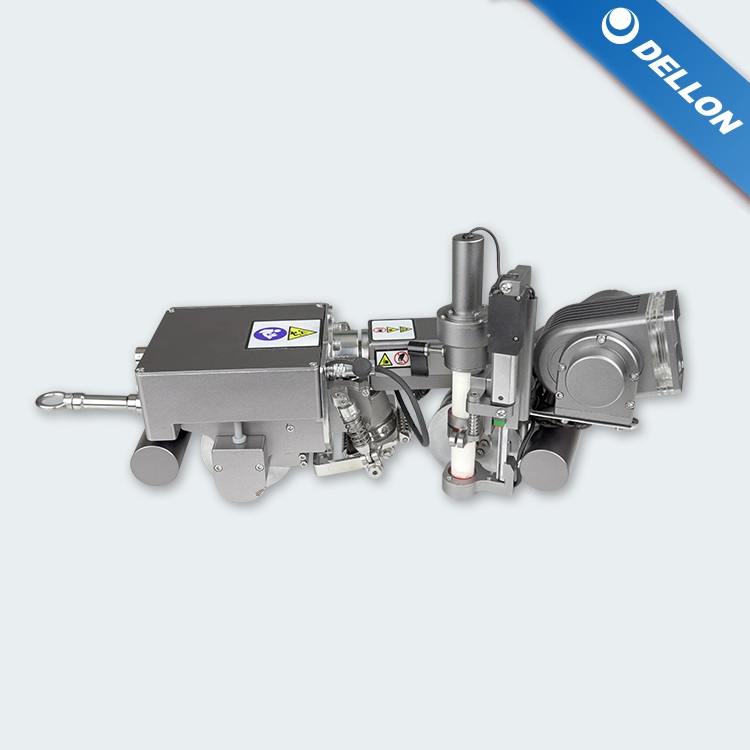
高空爬壁机器人 磁吸力强 检测精度高
价格:电议
地区: 北京市
电 话:4006988159
手 机:18039545718
传 真:86 010 67534405
图文详情
产品属性
相关推荐
1、爬壁机器人主机操作软件具备人机交互、用户管理、参数输入、报表生成和输出/打印、数据维护备份、运行日志、联机帮助等功能模块。
2、集成前视和后视双像机:在地面上即可对高空构件的检测位置和检测路线进行实时监视和调整,确保检测轨迹的可控性。 3、磁吸力强、负重荷大、安全性高:采用稀土高强度永磁轮,能牢固地吸附在铁磁性构件表面(静止时人力也很难扯拉下来),即意外断电也不会从构件上坠落。另配有防坠器可防止偶然意外跌落。
4、运动姿态多样:可以安全的进行垂直、水平(上下面)、倾斜、倒立等不同姿态的铁磁材料表面行进。
5、运动精度高:采用高功率双电机驱动模式,可精准进退和转向;配备高精度编码器可实现到毫米级的程序化步进检测,可精准设置纵向进退的步进间距及行程。
6、车身灵巧:尺寸小巧、转弯半径小;具有把手能方便搬移、施放、回收。
7、运动导引功能全:带有宏观视频监视功能,能及时观测到被检面的视频情况。
8、爬壁机器人具有距离定位(定位误差≤30mm)、(选配)缺陷打标功能,方便重复观测可疑区域。
9、具有探头电动升降机构,在跨越焊缝、凸起等障碍物时能将探头抬起,避免拌阻。
10、专业设计的“扫查夹持机构”,确保了行进和探头耦合的稳定性。
11、爬壁机器人采用特制线缆、防爆插头,并具有漏电保护装置,具有很高的电气安全性。
12、爬壁机器人车体上的EAMT等电路模块均密封在防护盒内,防止水、铁屑等异物进入。
13、便携式收放线缆架,集成可分离式、高亮(阳光下可视)高清工控平板充分考虑了现场操作环境和使用条件。
14、全程控运动并行同步处理:同时可获取超声数据、图像数据、行进距离数据,可保证数据及记录的同步性、准确性,大大提高工作效率。


30m
≤4mm
精度0.04mm、范围2~120mm(钢)
±25°
-10~+50℃
自动闸门、手动单闸门、手动双闸门
