
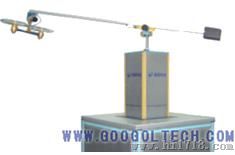
三自由度直升机模型
价格:电议
地区:山东省 济南市
电 话:0531-87180860
手 机:18653120376
传 真:0531-87180860
图文详情
产品属性
相关推荐
概述:
三自由度直升机模型是一款非常有趣的教学产品,学生可以把控制直升机飞行姿态和速度算法运用到该平台上,来实际验证算法的控制效果。从PID、LQR到H∞ 和模糊控制算法都可以在此平台上试验,对自动控制、机电一体化和航空航天等相关来说,无疑是一款非常好的教学实验平台。
系统结构及工作原理
直升机控制系统由直升机本体、两套直流电机、三套光电编码器、运动控制卡等部件组成。
两个直流电机被安装在直升机本体的末端来驱动两个螺旋桨,通过安装在支点和两个螺旋桨中心的编码器把直升机的俯仰角、螺旋桨的翻转角和旋转速度反馈到控制卡,再由用户编写的控制算法计算出控制量发给两个电机进行飞行姿态和速度的控制。
该装置通过分别控制两个螺旋桨的转速,产生升力来达到直升机的巡航和姿态控制,而升力的大小同螺旋桨距作用面的距离是相关的。这样在巡航阶段容易实现动力模型的参数变化,是用来对先进控制算法进行检验的理想试验对象.
控制软件
包含DOS版控制软件和MATLAB控制软件。
系统特点
硬件平台基于PC和开放式DSP运动控制器
1.为航空航天等相关提供了原理性研究的实体实验平台
2.为动态系统建模,经典控制理论、现代控制理论、优化控制理论和智能控制理论提供了算法验证平台
3. 该系统是一个典型的多输入-多输出系统(MIMO)。
主要技术参数
项 目 | 型号或主要参数 |
外形尺寸(长×宽×高) | 600mm×600mm×1290mm |
俯仰角 | -30°~40° |
巡航角 | 0°~360° |
电源输入 | AC220V 50Hz 2A |
重 量 | 50Kg |
运动控制器 | GT-400-SV |
直流电机 | 12V 20A |
编码器 | 600P/R |
集电环 | 18线 |
订购指南
产品代码:GHP2002
产品名称:三自由度直升机模型
产品描述:AHP-MB-2002 直升机模型本体
GT-400-SV-PCI-EDU GT-400-SV型运动控制器
SHP-DOS-2002 直升机DOS版实验软件(含源代码)
S-UP-MAT 固高Simulink通用软件实验平台
