
如何实现西门子S120主从控制方案
发布时间:2018/7/6 8:40:00如何实现西门子S120主从控制方案
希殿电气技术(上海)有限公司(西门子合作伙伴)
联系人 :康经理(销售工程师)发布
1 主从控制方案概述
在变频器的实际使用过程中,经常由于工艺的要求或者变频器容量的限制,会采用一个传动设备是由两个或多个电机驱动共同配合工作的方案,这种情况下,各驱动电机之间需要保证相同的运行速度,以及转矩的平均分配,为此,我们需要在驱动电机的变频器上实现需要的速度及转矩分配控制要求,变频器的这种应用我们称之为主从控制应用。
针对主从控制应用的方案,我们通常在变频器上采用如下两种控制方法来实现:
· 直接转矩分配
· 速度偏差与转矩限幅
1.1直接转矩分配
直接转矩分配方案主要应用于电机之间是硬连接方式,如齿轮、同轴等,电机之间通过连接器保持相同的转速,如下图:
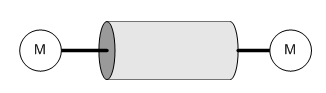
图1
在配置直接转矩控制方式时,需要将主机设定在速度模式工作,从机设定在转矩模式工作,将主机的转矩设定值作为从机的转矩给定值,这样保证系统运行时,从机转矩始终与主机一致,同时因为机械结构的原因,从机速度始终与主机相同,这样就完成了转矩的分配。
该方式的特点是,从机转矩始终跟随主机转矩,系统按照主机的速度环运行,转矩响应比较快。
1.2速度偏差与转矩限幅
速度偏差与转矩限幅的方案主要应用于电机之间软连接方式,如皮带、绳索等,由于是柔性材料产生的耦合关系,电机之间需要有相同的运行速度,同时保证电机力矩的均匀分配,还要有防止连接断裂时的保护。
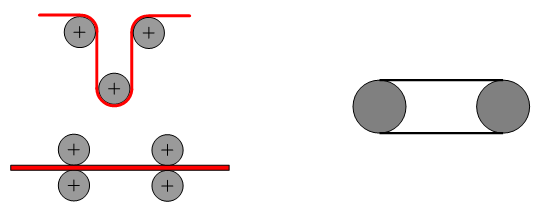
图2
在速度偏差与转矩限幅方式时,主机从机都工作在速度模式,主从机的速度设定值相同,然后从机在此基础上附加+/- 5%-10%左右的速度偏差(与运行方向有关,附加速度大小由实际情况决定),将主机的转矩值连接到从机的转矩限幅上。在启动后,由于速度偏差的存在,连接的材料迅速拉紧,从机的速度环饱和,输出的转矩受转矩限辐限制,从而保证从机的转矩跟随主机的转矩;从机速度受到连接的牵引,与主机速度相同。当发生断带时,主从电机工作在各自的速度环模式下,不会发生飞车现象。
该模式的特点是,启动瞬间主机从机的速度环都起作用,张力的建立比较平缓,避免系统产生振荡。既保证了速度及转矩的分配,也对系统进行了保护。
2 S120系统的主从控制方案的配置
实际使用过程中,根据使用的设备类型不同,常见的有几种不同的硬件配置方案。
2.1 CU310主从配置
使用CU310作为控制单元,主从数据交换可以通过如下两种方法:
· PROFIBUS DP的SLAVE TO SLAVE通讯;
· 通过TM31端子模块DI/DO和AI/AO;
a. PROFIBUS DP连接到PLC上(见图3),此时可以借助PROFIBUS DP的SLAVE
TO SLAVE通讯,实现两个S120设备之间的数据交换,具体操作说明请参考下面链接:
http://www.ad.siemens.com.cn/download/docMessage.aspx?id=4390

图3
b. 通过TM31端子模块互相连接(图4),使用DI/DO和AI/AO完成数据交换。模拟量信号使用电流信号,采用双绞屏蔽电缆,抗干扰性比较强。
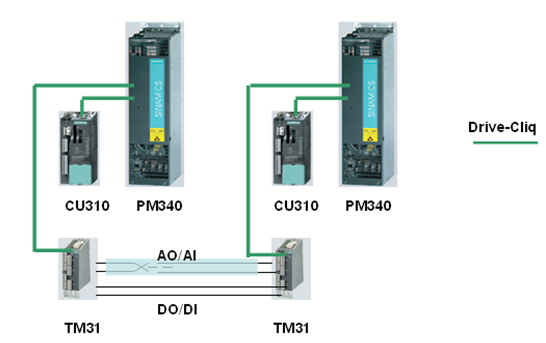
图4
2.2 CU320主从配置
使用CU320作为控制单元,主从数据交换可以通过如下几种方法:
· PROFIBUS DP的SLAVE TO SLAVE通讯;
· 通过TM31端子模块DI/DO和AI/AO;
· Sinamics Link通讯;
· TB30端子扩展板的DI/DO和AI/AO;
· CU320的多轴直接连接;
a. PROFIBUS DP连接到PLC上(见图5),此时可以借助PROFIBUS DP的SLAVETO SLAVE通讯,实现两个S120设备之间的数据交换,具体操作说明请参考下面链接:
http://www.ad.siemens.com.cn/download/docMessage.aspx?id=4390
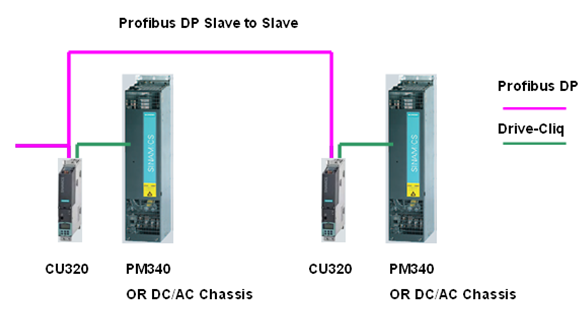
图5
b. 通过TM31端子模块互相连接(图6),使用DI/DO和AI/AO完成数据交换。模拟量信号使用电流信号,采用双绞屏蔽电缆,尽量减少被干扰的可能性。
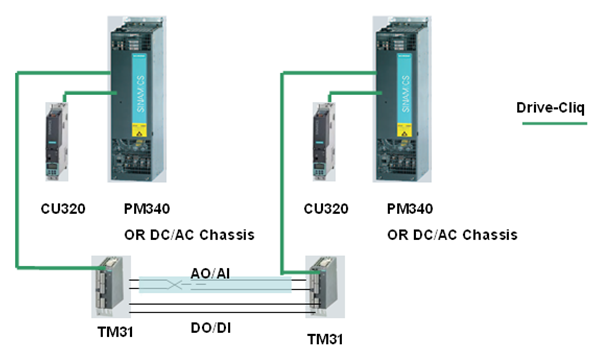
图6
c. 通过在CU320扩展插槽增加CBE20通讯板,使用装置间主从通讯Sinamics Link网络(图7),具体配置方法见下面链接:
http://www.ad.siemens.com.cn/download/docMessage.aspx?id=5830
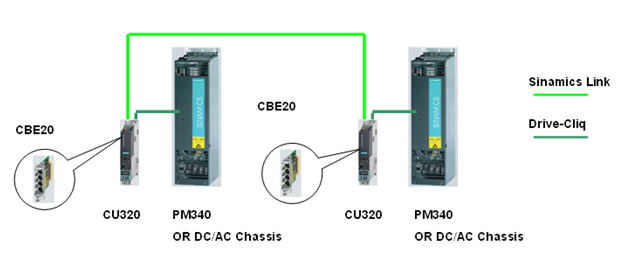
图7
d. 通过在CU320扩展插槽增加TB30端子板,使用I/O端子来实现数据交换(图8),但是TB30模拟量信号只支持电压型信号,需要注意可能发生的干扰问题。
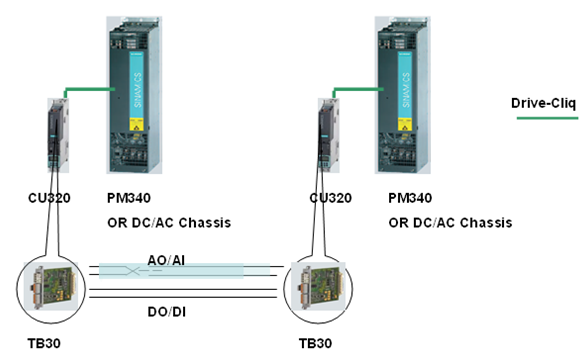
图8
e. 在一个CU320单元连接多个驱动轴的情况下,直接利用轴间变量的互连(图9),来实现主从控制的数据交换,该种方式下,当CU出现故障,两台设备都将无法运行。
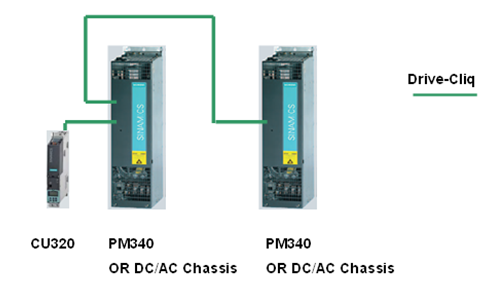
图9
3 S120系统的主从控制方案的配置
3.1 基本调试
在进行主从控制配置时,首先需要完成基本驱动单元的调试,具体步骤参见调试手册:
http://www.ad.siemens.com.cn/download/SearchResult.aspx?searchText=a0439
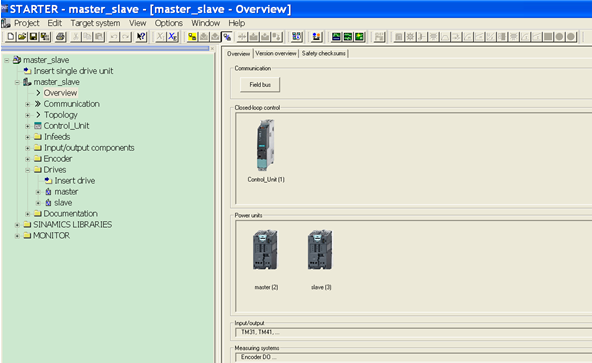
图10 建立项目
3.2 配置主从通讯方式
根据实际使用的主从通讯方式,定义传输的数据,下表以网络通讯为例的主从通讯数据表(仅作参考,实际设定根据需要定义):
主机发送 | 主机接收 | 从机发送 | 从机接收 |
控制字 | 从机状态字 | 状态字 | 主机控制字 |
状态字 | 自定义 | 自定义 | 主机状态字 |
转矩设定值 | 主机转矩设定值 | ||
速度设定值 | 主机速度设定值 | ||
自定义 | 自定义 |
3.3 配置主从工作模式
完成基本调试后,确定电机的优化、运行都正常后,根据配置的主从方案,来进行主从工作模式的设置。
3.3.1 配置直接转矩分配方式
在直接转矩工作模式时,主机工作在速度模式,从机工作在转矩模式,而从机设定为转矩控制方式共有两种不同的方法:
a. 通过参数直接选择转矩工作模式
选择从机转矩工作模式P1300=22 or 23(图11),
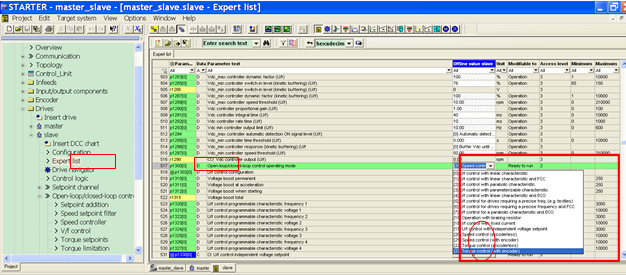
图11 电机工作模式设定
然后在转矩的给定值P1503处()选则主机的转矩设定值r079(实际值r080也可以,但是设定值相对波动小)(图12)。
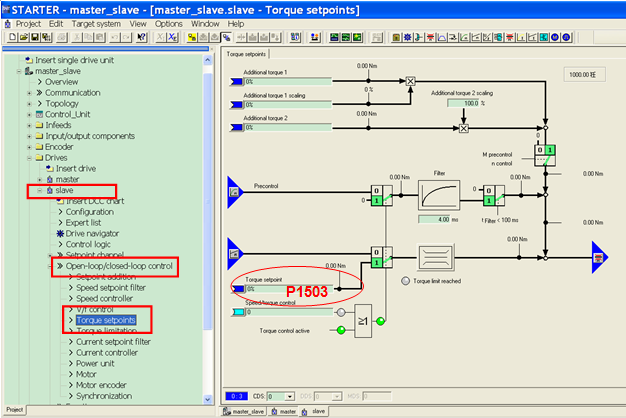
图12
将从机的控制字命令源连接到主机的控制字,用来得到相同的启动逻辑,保证主从设备的同时启动、停止,并实现故障保护。(图13 )
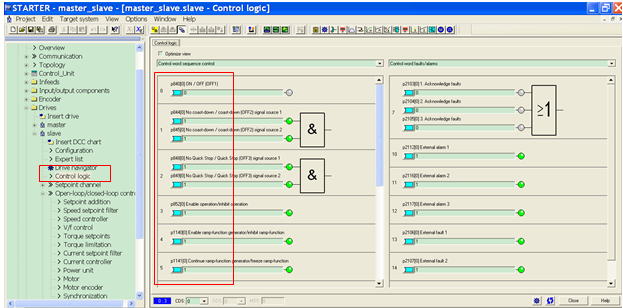
图13
b. 通过参数切换,旁路速度调节器的输出到转矩直接设定
选择从机转矩工作在速度模式,P1300=20 or 21,然后设定P1501切换速度模式到转矩模式,P1503转矩设定源链接主机的转矩设定r079(图15),
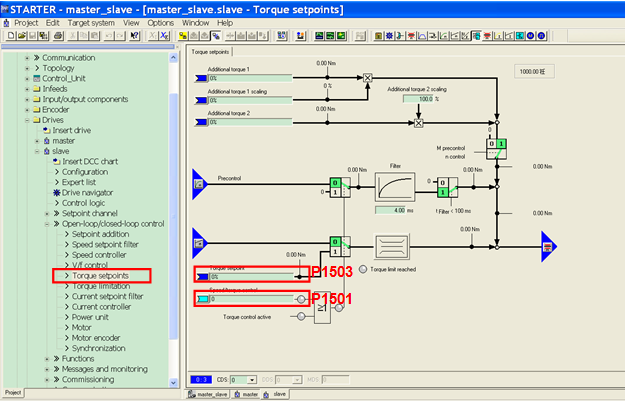
图15
3.3.2 速度偏差与转矩限幅方式
在速度偏差与转矩限幅时,主机从机都工作在速度模式,P1300=20or 21,从机的设定速度在主机设定速度的基础上附加一个偏差速度?V(通常10%,仅作参考),超前或滞后的关系由实际的电机位置决定见下图:
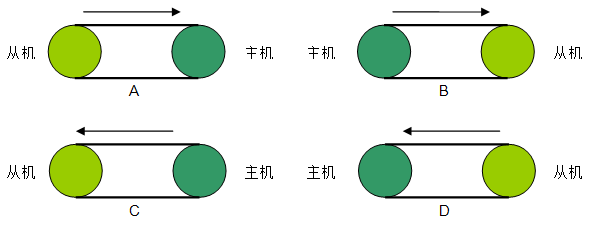
图16
A方案工作时:从机的速度设定值滞后主机速度设定值,Nset从= Nset主-?V;
B方案工作时:从机的速度设定值超前主机速度设定值,Nset从= Nset主+?V;
C方案工作时:从机的速度设定值超前主机速度设定值,Nset从= Nset主+?V;
D方案工作时:从机的速度设定值滞后主机速度设定值,Nset从= Nset主-?V;
然后设定转矩限幅的源P1522连接到主机的转矩设定值r079(如图17)
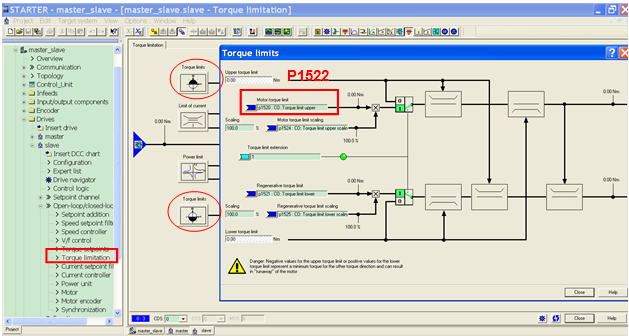
图17
当启动后,由于速度偏差的存在,从机与主机间的材料迅速拉紧,从机的速度环快速进入饱和状态,输出转矩由转矩限幅决定,从而实现了主从负荷分配。
同时对于可能断带的材料,该方式起到很好的保护作用。当材料断开,从机从速度环快速退饱和,转入速度闭环,不会导致飞车。